How to use Lua scripts
1. General
1.1 Purpose
- This manual helps you create and run Lua scripts on emDrive.
- It also informs you about any warnings and known issues.
1.2 Scope
- The manual covers Lua scripting features, including how to:
- Download scripts
- Control scripts
- Debug scripts
- Use functions provided by the emDrive library
- It also lists known issues and limitations of the scripting functionality.
1.3 Important Note
- This manual assumes you already know Lua and emDrive Configurator software.
- It is valid for Lua version 5.4. For more details on Lua, visit:
2. emDrive library
2.1 General
The emDrive library is used instead of the standard Lua libraries. This library includes some functions that are identical to those in the standard Lua library, some that have been modified, and others that are unique to emDrive.
Do not overwrite the emDrive library functions and variables.
The emDrive library is organized into different sets, each focused on a specific group of functionalities. This section will describe these sets and their functions and variables in detail.
Here is an example of how to use a library function. This example will show a legend that explains how to read the prototypes of library functions. Words in blue represent variable types, such as arguments or return values. These types follow standard Lua conventions, with the addition of the "integer" type, which represents whole numbers.
When your script calls a function from the emDrive library, the arguments you provide must match the prototype exactly, including the type and, for tables, their structure. If they do not, an error will occur.
number | nil ret1, boolean ret2 = Namespace.FunctionName({integer arg1Field1, string arg1Field2} arg1,
{integer, integer, integer [5:5-11], integer [13]} arg2, [, string arg3], arg4…)
This is an example of a function named Namespace.FunctionName. It takes in: 2 fixed arguments, 1 optional
argument and a variable number of arguments. It also returns 2 values where the first can also be nil.
|
|
Name |
Description |
|
Arguments |
arg1 |
Table with two named fields arg1Field1 of type integer and arg1Field2 of type string. |
|
arg2 |
Table with unnamed fields with all integer types at index 1, 2, 5 with size 1 to 7 and 13. |
|
|
arg3 |
Optional string argument. |
|
|
arg4 |
Variable number of arguments of any type. |
|
|
Returns |
ret1 |
First returned value which can be either a number type or nil. |
|
ret2 |
Second returned value which is of boolean type. |
Functions can be called with more arguments then expected in which case excess arguments are ignored.
The emDrive library can raise errors in addition to those raised by the Lua kernel, such as accessing nil values. These library errors usually occur when the type or value of an argument does not match what is expected.
For each function in the emDrive library, the possible errors (exceptions) and the conditions that cause them will be listed.
2.2 Functions
2.2.1 Base
This library provides base script functionality that is not specific to any part of the emDrive hardware (HW) or firmware (FW).
Error(string message [, integer level])
The Error function raises an error with a custom message and specifies the level of the error position. It is useful for throwing exceptions, such as for debugging purposes. This function is equivalent to the standard error() function in Lua and never returns.
|
|
Name |
Description |
|
Arguments |
message |
Error message shown. |
|
level |
Specify how to get the error position: · 0, error position is not added, · 1 (default), the error position is where the error() function was called, · 2 points the error to where the function that called error() was called, · and so on… |
2.2.2 I/O
This library works with two main objects: Lua__IO_Input and Lua__IO_Output. These objects facilitate communication between the script and the external world, such as displaying messages or providing debugging arguments to the script.
- Access: These objects can be accessed via the CANopen index
0x2040. - Purpose:
Lua__IO_Input: Used to input data into the script.Lua__IO_Output: Used to output data from the script.
By using these objects, the script can efficiently exchange information with external systems.
___________________________________________________________________________________________________________________________________________
number | string | nil value = IO.Read([option…])
You can read values from the input object using specified options.
Options:
- When the 'n' option is selected, if the value cannot be converted to a number,
nilis returned. - By passing an integer, you can read that many number of characters.
This function is equivalent to the standard io.read() function in Lua.
|
|
Name |
Description |
|
Arguments |
option |
How to interpret the input string: · ‘n’ as a number, · ‘l’ (default) as one line string without newline, · ‘L’ as one line string with newline if exists, · ‘a’ as string of all text, · 0, 1, 2, … as number of characters. |
|
Returns |
value |
Interpreted input. |
|
Exception |
|
option is not an integer nor a string. |
|
option is a string longer than 1 character. |
|
option is a string but not one of the valid values. |
___________________________________________________________________________________________________________________________________________
IO.Write(string text…)
You can write text to the output object using this function.
- Behavior:
- If the text is short enough, it is appended to the existing output string.
- If the text is too long, the existing output string is overwritten.
This function is equivalent to the standard io.write() function in Lua.
|
|
Name |
Description |
|
Arguments |
text |
Text to write to output object. |
|
Exception |
|
text is not a string. |
___________________________________________________________________________________________________________________________________________
IO.Print(object…)
This function converts an object to a string and then writes the result to the output object.
This function is equivalent to the standard print() function in Lua.
|
|
Name |
Description |
|
Arguments |
object |
Objects to convert to string and write to output object. |
2.2.3 Time
This library provides functions for time keeping and inserting delays in your scripts.
___________________________________________________________________________________________________________________________________________
integer time = Time.GetMs()
This function retrieves the current time in milliseconds since the device was powered on. The maximum value is limited to 2³² – 1.
|
|
Name |
Description |
|
Returns |
time |
Elapsed milliseconds since power on. |
___________________________________________________________________________________________________________________________________________
Time.WaitMs(integer time)
This function halts the script execution for a specified amount of time using this function.
|
|
Name |
Description |
|
Returns |
time |
Milliseconds to wait. |
|
Exception |
|
time is negative or 0. |
___________________________________________________________________________________________________________________________________________
integer newStartTime = Time.WaitMsUntil(integer startTime, integer waitTime)
This function halts script execution for specified time from the provided starting time. This function can be used to implement periodic execution independent of logic execution duration.
|
|
Name |
Description |
|
Arguments |
startTime |
Time (milliseconds) from which waiting time is measured. |
|
waitTime |
Milliseconds to wait. |
|
|
Returns |
newStartTime |
Time (milliseconds) at which script was halted. |
|
Exception |
|
startTime is negative or 0. |
|
waitTime is negative or 0. |
2.2.3 CAN
This library is used to establish communication and transfer data over CAN. It provides functionality to send and receive CAN messages.
Note: This library does not support CAN FD (Flexible Data-rate).
___________________________________________________________________________________________________________________________________________
This library supports two modes of operation for CAN communication. The mode is selected during the initialization of CAN.
|
Mode |
Description |
|
CAN_RX_TX |
CAN shall be used to send and receive messages (user is required to implement CAN.Received(message) function). |
|
CAN_TX_ONLY |
CAN shall be used only to send messages. |
___________________________________________________________________________________________________________________________________________
CAN.Initialize(mode, boolean useExtendedFrame [, integer rxID, integer rxIDMask])
To use CAN communication, initialize CAN with this function. It can be called multiple times with different arguments, but only the last configuration will be used.
- rxIDMask Argument: Required only when the operating mode is set to
CAN_RX_TX.
|
|
Name |
Description |
|
Arguments |
mode |
CAN mode of operation (see Table 12). |
|
useExtendedFrame |
Will extended frames be transferred? |
|
|
rxID |
Frame ID to receive. |
|
|
rxIDMask |
Receive filter ID mask. |
|
Exception |
|
mode is not one of the valid values. |
|
useExtendedFrame is not boolean. |
|
rxID is not an integer. |
|
mode is set to CAN_RX_TX and rxIDMask is not an integer. |
|
CAN initialization failed (should never happen). |
___________________________________________________________________________________________________________________________________________
CAN.Send(integer id, {integer [1:1-8]} data)
Use this function to send a CAN frame with a specified ID and data.
|
|
Name |
Description |
|
Arguments |
id |
Sent frame ID. |
|
data |
1 to 8 bytes of data. |
|
Exception |
|
id is not an integer. |
|
data is not a table. |
|
Length of data is more than 8. |
|
Value of data is not an integer. |
|
Value of data is more than 0xFF. |
|
CAN send failed (should never happen). |
___________________________________________________________________________________________________________________________________________
CAN.Received({integer ID, integer Length, integer Data[1:1-8]} message)
This function is called whenever a CAN message is received.
- User Implementation Required: You must implement this function if CAN is initialized in
CAN_RX_TXoperating mode.
|
|
Name |
Description |
|
Arguments |
message |
Received message. |
2.2.4 CANopen
This library is used to interact with the CANopen protocol stack.
- CANopen Object Representation: Internally, a CANopen object is represented as a table with two values:
indexandsubindex.
___________________________________________________________________________________________________________________________________________
The CANopen stack includes a network management state machine that defines the communication behavior of a CANopen device. While there are multiple possible states, only a few are regularly used and available to the user.
|
NMT state |
Description |
|
CO_UNKNOWN |
NMT in unknown state (unreachable). This state cannot be set by user. |
|
CO_OPERATIONAL |
Device can use all supported communication objects. This state can be set by user. |
|
CO_STOPPED |
Device operation is stopped. This state cannot be set by user. |
|
CO_PREOPERATIONAL |
First state after initialization indicating that device is ready to work. Limited message transfer support. This state can be set by user. |
|
CO_RESET_NODE |
Application reset. Application objects set to their power-on or default values. This state cannot be set by user. |
|
CO_RESET_COMM |
Communication reset. Communication objects are set to their power-on or default values. This state cannot be set by user. |
___________________________________________________________________________________________________________________________________________
state = CANopen.GetNMTState()
Use this function to retrieve the currently set Network Management (NMT) state of the CANopen device.
|
|
Name |
Description |
|
Arguments |
state |
Currently set NMT state (see Table 18). |
___________________________________________________________________________________________________________________________________________
CANopen.SetNMTState(state)
Use this function to request the CANopen stack to change the Network Management (NMT) state of the device.
|
|
Name |
Description |
|
Arguments |
state |
Next NMT state (see Table 18). |
|
Exception |
|
state is not one of the valid values. |
___________________________________________________________________________________________________________________________________________
number value = CANopen.GetObjectValue({integer, integer} object)
Use this function to retrieve the value of a specified object.
|
|
Name |
Description |
|
Arguments |
object |
CANopen object. |
|
Returns |
value |
Object value. |
|
Exception |
|
object is not a table. |
|
Length of object is not 2. |
|
Value at first index of object is not an integer. |
|
Value at second index of object is not an integer. |
|
Invalid object index and/or subindex. |
___________________________________________________________________________________________________________________________________________
CANopen.SetObjectValue({integer, integer} object, number value)
Use this function to set the value of a specified object.
|
|
Name |
Description |
|
Arguments |
object |
CANopen object. |
|
value |
Object value. |
|
Exception |
|
object is not a table. |
|
Length of object is not 2. |
|
Value at first index of object is not an integer. |
|
Value at second index of object is not an integer. |
|
Invalid object index and/or subindex. |
|
Value is not a number |
2.2.5 Motor
This library is used to operate the motor. You can set operating parameters and retrieve the motor's current state and status.
___________________________________________________________________________________________________________________________________________
The motor can be controlled in three distinct modes. Depending on the chosen mode, the related reference will be used by the motor control algorithm.
|
Motor control mode |
Description |
|
TORQUE_MODE |
Motor is torque controlled. Set requested torque with Motor.SetReferenceTorque(). |
|
VELOCITY_MODE |
Motor is velocity controlled. Set requested velocity with Motor.SetReferenceVelocity(). |
|
POSITION_MODE |
Motor is position controlled. Set requested torque with Motor.SetReferencePosition(). |
___________________________________________________________________________________________________________________________________________
Motor control operates with a state machine that can be in one of multiple states. This state machine is responsible for top-level motor control functions such as initialization, execution, calibration, and error handling.
- State Execution: Some states are executed before the script runs and will not be visible to the user.
|
Motor control state |
Description |
|
MOTOR_UNDEFINED |
Motor control in undefined state (internal error). |
|
MOTOR_INITIALIZATION |
Motor control is initializing. |
|
MOTOR_SELF_TEST |
Motor control is performing start-up self-tests. |
|
MOTOR_OFF |
Motor control is initialized and disabled. Controlling the motor is not possible. Reference values have no effect. |
|
MOTOR_ON |
Motor control is initialized and enabled. Motor is controlled according to mode and reference value such that the operating conditions are always within defined limits. |
|
MOTOR_ERROR |
Motor control detected an error and was disabled. This state can be entered in multiple ways: limits overreached, failed calibration and other. |
|
MOTOR_CALIBRATION |
Motor control is being calibrated. In this state characteristics of the motor and angle sensor are being measured. |
___________________________________________________________________________________________________________________________________________
Motor.Enable()
Enable motor control to have the motor operate according to the set mode and the corresponding reference value.
___________________________________________________________________________________________________________________________________________
Motor.Disable()
Disable motor control to stop the motor.
___________________________________________________________________________________________________________________________________________
Motor.Recover()
Use this function to attempt recovery from a motor control error.
Note: This function is only applicable when the motor control is in an error state.
___________________________________________________________________________________________________________________________________________
Motor.SetControlMode(mode)
Use this function to set the motor control mode.
|
|
Name |
Description |
|
Arguments |
mode |
Motor control mode (see Table 26). |
|
Exception |
|
mode is not one of the valid values. |
___________________________________________________________________________________________________________________________________________
state = Motor.GetState()
Retrieve the current state of the motor control.
|
|
Name |
Description |
|
Returns |
state |
Motor control state (see Table 27). |
___________________________________________________________________________________________________________________________________________
integer warnings = Motor.GetWarnings()
Retrieve the currently active motor control warnings.
|
|
Name |
Description |
|
Returns |
warnings |
Active warnings. Refer to emDrive manual or related CANopen object for value meaning. |
___________________________________________________________________________________________________________________________________________
number velocity = Motor.GetReferenceVelocity()
Retrieve the currently set reference velocity.
|
|
Name |
Description |
|
Returns |
velocity |
Velocity [RPM]. |
___________________________________________________________________________________________________________________________________________
Motor.SetReferenceVelocity(number velocity)
Set the reference velocity.
|
|
Name |
Description |
|
Arguments |
velocity |
Velocity [RPM]. |
|
Exception |
|
velocity is not a number. |
___________________________________________________________________________________________________________________________________________
number torque = Motor.GetReferenceTorque()
Retrieve the currently set reference torque.
|
|
Name |
Description |
|
Returns |
torque |
Torque [Nm]. |
___________________________________________________________________________________________________________________________________________
Motor.SetReferenceTorque(number torque)
Set the reference torque.
|
|
Name |
Description |
|
Arguments |
torque |
Torque [Nm]. |
|
Exception |
|
torque is not a number. |
___________________________________________________________________________________________________________________________________________
number position = Motor.GetReferencePosition()
Retrieve the currently set reference position.
|
|
Name |
Description |
|
Returns |
position |
Position [°]. |
___________________________________________________________________________________________________________________________________________
Motor.SetReferencePosition(number position)
Set the reference position.
|
|
Name |
Description |
|
Arguments |
position |
Position [°C]. |
|
Exception |
|
position is not a number. |
___________________________________________________________________________________________________________________________________________
number velocity = Motor.GetVelocity()
Retrieve the current motor velocity.
|
|
Name |
Description |
|
Returns |
velocity |
Velocity [RPM]. |
___________________________________________________________________________________________________________________________________________
number torque = Motor.GetTorque()
Retrieve the current motor torque.
|
|
Name |
Description |
|
Returns |
torque |
Torque [Nm]. |
___________________________________________________________________________________________________________________________________________
number position = Motor.GetPosition()
Retrieve the current motor position.
|
|
Name |
Description |
|
Returns |
position |
Position [°C]. |
2.2.6 Digital
This library is used to manipulate digital I/Os (ports). It enables writing to and reading from digital ports.
___________________________________________________________________________________________________________________________________________
Every emDrive contains a set of digital ports that can be freely used by the user application. Some of these ports are writable, while others are read-only. Note that some ports might not be available on all emDrives. To see which ports are available, refer to the manual or the EDS of your emDrive
|
Digital port |
Description |
|
LOW_SIDE_1 |
Low-side switch 1. |
|
LOW_SIDE_2 |
Low-side switch 2. |
|
LOW_SIDE_3 |
Low-side switch 3. |
|
LOW_SIDE_4 |
Low-side switch 4. |
|
HIGH_SIDE_1 |
High-side switch 1. |
|
DIGITAL_IN_1 |
Digital input 1. This port is read-only. |
|
DIGITAL_IN_2 |
Digital input 2. This port is read-only. |
|
DIGITAL_IN_3 |
Digital input 3. This port is read-only. |
|
DIGITAL_IN_4 |
Digital input 4. This port is read-only. |
|
DIGITAL_IN_5 |
Digital input 5. This port is read-only. |
|
DIGITAL_IN_6 |
Digital input 6. This port is read-only. |
|
DIGITAL_IN_7 |
Digital input 7. This port is read-only. |
___________________________________________________________________________________________________________________________________________
number state = Digital.Get(port)
Retrieve the digital state of the port.
|
|
Name |
Description |
|
Arguments |
port |
Digital port (see Table 44). |
|
Returns |
state |
Value of 0 – 1 representing signal’s duty cycle. |
|
Exception |
|
port is not one of the valid values. |
___________________________________________________________________________________________________________________________________________
Digital.Set(port, number state)
Set the digital state of the port.
|
|
Name |
Description |
|
Arguments |
port |
Digital port (see Table 44). |
|
state |
Value of 0 – 1 representing signal’s duty cycle. |
|
Exception |
|
port is not one of the valid values. |
|
state is not a number between 0 and 1. |
2.2.7 Analog
This library is used to retrieve values from analog inputs (ports).
___________________________________________________________________________________________________________________________________________
Every emDrive contains a set of analog ports that can be freely used by the user application. All of these ports are read-only. Note that some ports might not be available on all emDrives. To see which ports are available, refer to the manual or the EDS of your emDrive.
|
Analog port |
Description |
|
ANALOG_IN_1 |
Analog input 1. |
|
ANALOG_IN_2 |
Analog input 2. |
|
ANALOG_IN_3 |
Analog input 3. |
|
ANALOG_IN_4 |
Analog input 4. |
|
LOW_SIDE_1_VOLTAGE |
Low-side switch 1 voltage measurement. |
|
LOW_SIDE_1_CURRENT |
Low-side switch 1 current measurement. |
|
LOW_SIDE_2_VOLTAGE |
Low-side switch 2 voltage measurement. |
|
LOW_SIDE_3_VOLTAGE |
Low-side switch 3 voltage measurement. |
|
LOW_SIDE_4_VOLTAGE |
Low-side switch 4 voltage measurement. |
|
HIGH_SIDE_1_VOLTAGE |
High-side switch 1 voltage measurement. |
|
DIGITAL_IN_1 |
Digital input 1. |
|
DIGITAL_IN_2 |
Digital input 2. |
|
DIGITAL_IN_3 |
Digital input 3. |
|
DIGITAL_IN_4 |
Digital input 4. |
|
DIGITAL_IN_5 |
Digital input 5. |
|
DIGITAL_IN_6 |
Digital input 6. |
|
DIGITAL_IN_7 |
Digital input 7. |
___________________________________________________________________________________________________________________________________________
number value = Analog.Get(port)
Retrieve the analog value on the port.
|
|
Name |
Description |
|
Arguments |
port |
Analog port (see Table 49). |
|
Returns |
value |
Analog value. |
|
Exception |
|
port is not one of the valid values. |
3. Scripting
3.1 Setting Up Lua Scripting with Visual Studio Code
To make Lua scripting easier, follow these steps to set up Visual Studio Code with the Lua extension:
-
Install Visual Studio Code
- If you don't have it yet, download and install Visual Studio Code.
-
Add the Lua Extension
- Open Visual Studio Code.
- Go to the Extensions view (click on the square icon on the sidebar or press
Ctrl+Shift+X). - Search for "Lua" and install the Lua extension by sumneko.
-
Create a Folder for Libraries
- Make a new folder on your computer to store the emdrive library. For example, you can name it
D:\LuaLibraries.
- Make a new folder on your computer to store the emdrive library. For example, you can name it
-
Configure Developer Mode and Add Library Path
- Open Visual Studio Code.
- Press
Ctrl+Pto open the search bar. - Type
>settingsand select "Open User Settings (JSON)" from the list.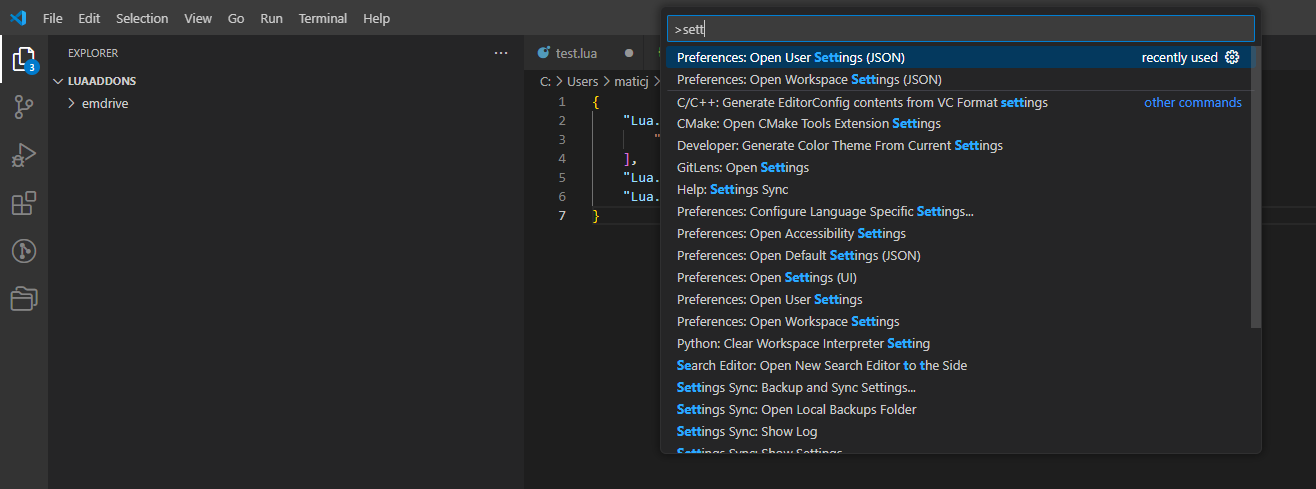
-
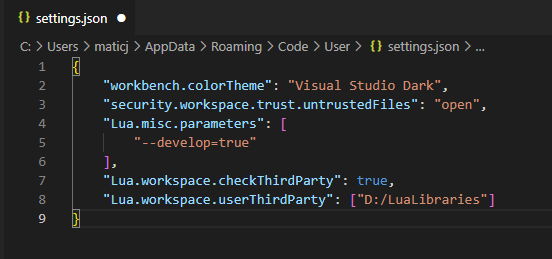
Edit User Settings (JSON)
- In the opened
settings.jsonfile, add the following code.
"Lua.misc.parameters": [ "--develop=true" ], "Lua.workspace.checkThirdParty": true, "Lua.workspace.userThirdParty": ["path_to_our_library"] - Make sure to keep any existing code intact. Add a comma at the end of the last line of the existing code, then paste the new code below it. Update the path to match your folder (
D:/LuaLibraries). Use forward slashes instead of backslashes.
- In the opened
-
Save and Close
- Save the changes to
settings.json. - Close Visual Studio Code.
- Save the changes to
Example of "settings.json":
3.2 Getting Started with Lua Scripting
3.2.1 Create "firstscript.lua"
-
Create a New Folder
- Make a new folder for your project.
-
Open the Folder with Visual Studio Code
- Right-click the folder and select "Open with Code."
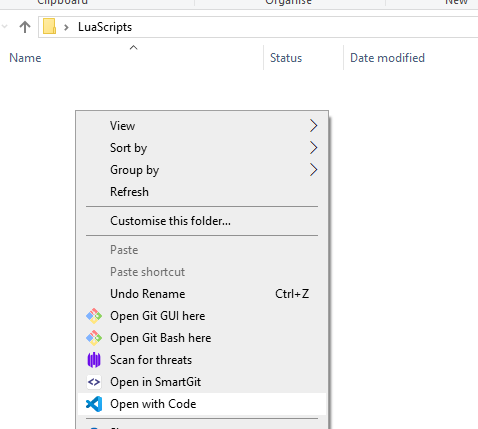
- This will open Visual Studio Code with your new folder as the workspace.
- Right-click the folder and select "Open with Code."
-
Create a New Lua Script
- In the Explorer window of Visual Studio Code, right-click and select "New File."
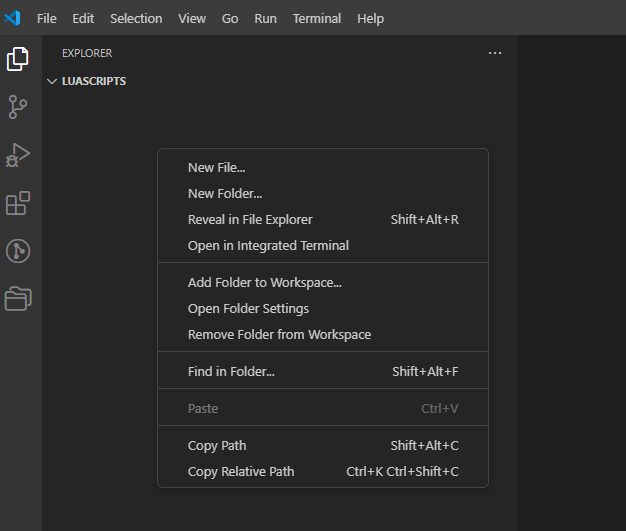
- Name the file
firstscript.lua(valid files are also "firstscript.txt", "firstscript". But it is better to use .lua which can use our emdrive Library in VS-code).
- In the Explorer window of Visual Studio Code, right-click and select "New File."
Note: Only the content of the script is transferred, not the file name.
Limitation: You can store only one script at a time on the emDrive.
3.2.2 Structure
Initialization Routine
- Function Requirement: Your script must include a function named
Initialize(). - Execution: This function is the first to run when the script is executed and runs only once.
- Purpose: Use this function to initialize hardware and firmware, such as:
- Setting up CAN
- Enabling the motor
- Setting outputs
- Setting global variables
Loop Routine
- Function Requirement: Your script must include a function named
Loop(). - Periodic Execution: This function runs periodically based on the
LoopPeriodMsvariable, which represents the period in milliseconds.- Setting the Period:
LoopPeriodMscan be set globally or within theInitialize()function.
- Setting the Period:
- Purpose: Use the
Loop()function for tasks that need regular updates, such as:- Setting motor velocity
- Parsing CAN frames
- Reading inputs and setting output ports
Minimum Loop Period: The minimum allowed loop period is 10 milliseconds.
Execution Time: Ensure the Loop() function completes within the set period to maintain deterministic execution. If the loop takes longer, it can cause unpredictable behavior.
Priority Consideration: The firmware on the emDrive has higher priority than the script, which means script execution may be interrupted by higher priority tasks.
Use the resource monitor (see the Resource Monitor section) to measure loop duration and determine the minimum possible loop period.
The resource monitor can also show the maximum loop duration when interrupted by higher priority tasks.
Data Transfer: Transferring large data over CAN/CANopen will completely block script execution.
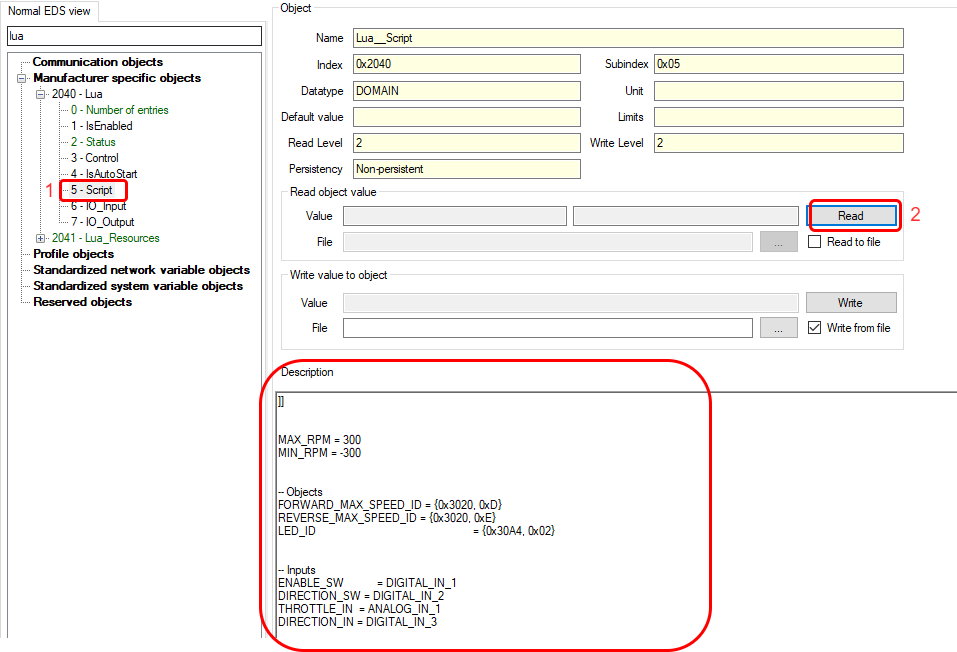
3.3 Executing script
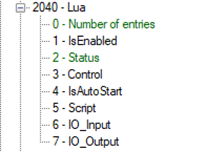
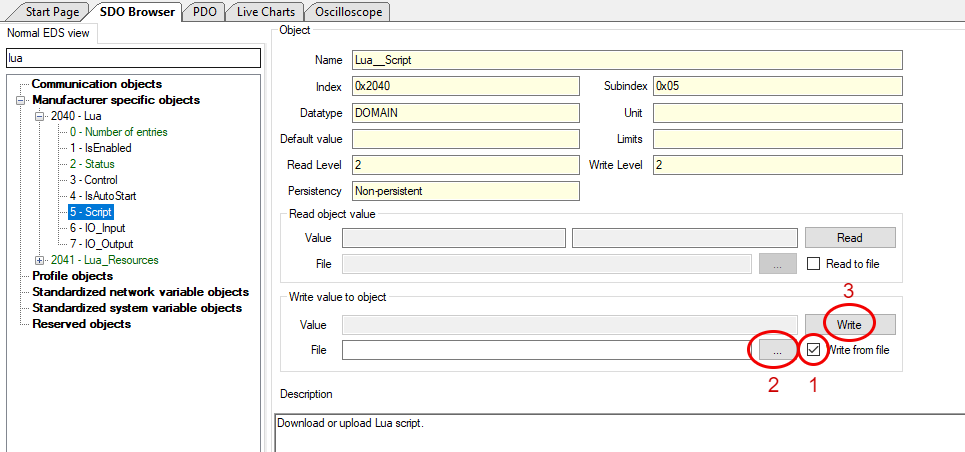
After you've created your script, it is time to download it to emDrive and execute it. For these purposes, a few CANopen objects are provided, as seen in Figure 3. They are grouped together and are accessible at index 0x2040.
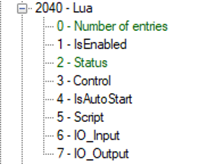
Table 52 provides a short description of objects related to script execution. More detailed meanings and use cases will be presented in the following sections.
|
Name |
Description |
|
IsEnabled |
Defines if Lua feature is enabled on particular emDrive: 0: Lua feature disabled 1: Lua feature enabled |
|
Status |
Lua status: 0: File is non-existent or corrupted, 1: Compilation failed (see Output), 2: Execution failed (see Output), 3: Downloaded file is valid, 4: Script execution is paused, 5: Script is executing, 6: Script timed out and was stopped. |
|
Control |
Lua script control: 0: Do nothing, 1: Pause, 2: Run, 3: Restart. |
|
IsAutoStart |
Should script be started automatically after device powers on? |
|
Script |
Download or upload Lua script. |
|
IO_Input |
Script input object. This object can be used to pass values/arguments to the script during runtime. |
|
IO_Output |
Script output object. This object is used to display error messages and can be used by script to print arbitrary text messages. |
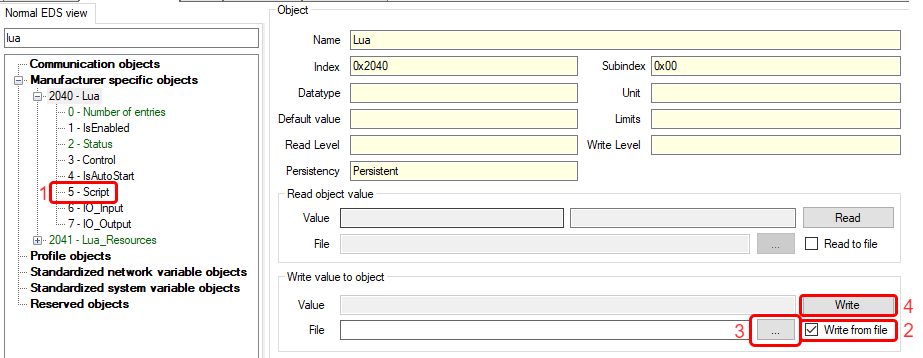
3.3.1 Download/Upload
- To download the script to emDrive
- click on Script object (0x2040, 0x5),
- check “Write from file”,
- click the “…” button which brings up an open file dialog where you select your script,
- click “Write” button which will download the script to emDrive,
- after successful download you should see a green progress bar with “Successful” label.
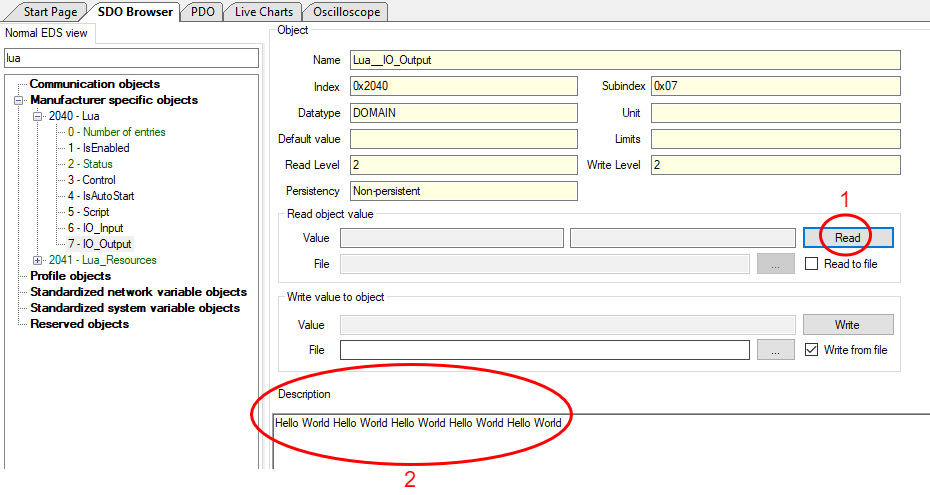
- To upload the script – this reads back the script currently stored on emDrive:
- click on Script object (0x2040, 0x5),
- click the “Read” button which will upload the script from emDrive and display it in the “Description” text box.
3.3.2 Control
Once the script has been successfully downloaded and verified, three control options become available through the Control object (0x2040, 0x3).
If a script is already executing when a new script is downloaded, the executing script is terminated as the download is initiated. After the new script is successfully downloaded and verified, it is automatically executed.
NOTE: The script is executed only after motor control has been initialized, which may delay script execution after the device powers on (usually by approximately 100 ms, although this value may vary).
3.3.3 Errors
When an error with the script is detected, the Status object (0x2040, 0x2) is set to a value signaling the type of error. There are four distinct types of errors that are detectable at different stages of script execution:
-
File is non-existent or corrupted (Status = 0): This is set when the script is not stored on the emDrive, or the stored script is corrupted. This error is triggered when script verification fails, either when the device powers on or whenever a new script is downloaded.
-
Compilation failed (Status = 1): This is set when the script could not be compiled, which could be caused by syntax errors or running out of memory. This error is triggered every time script compilation fails, such as when the script is restarted, executed for the first time, or downloaded while another script is already executing, causing the new script to be automatically compiled after downloading.
-
Execution failed (Status = 2): This is set when an error occurs during runtime—such as in initialization, loop, or other required routines—caused by several reasons like accessing nil objects, passing invalid values, missing functions, running out of memory, and others. This error is also raised if the
Error()function is called from within the script. -
Script timed out and was stopped (Status = 6): This is set when the initialization, loop, or other required routines take longer to execute than expected.
The initialization routine must execute within 100 ms, while the loop and other routines are required to execute within 2 × LoopPeriodMs.
Further details of what went wrong with the script can be retrieved from the output object.
All the above-mentioned errors are permanent. When an error is raised, emDrive protection is activated, and emDrive enters an error state from which it cannot recover (refer to the emDrive manual for more details about protections and error states). At this point, the script should be corrected for errors, downloaded to the emDrive, and then the device should be reset to clear the error.
3.3.4 Debugging
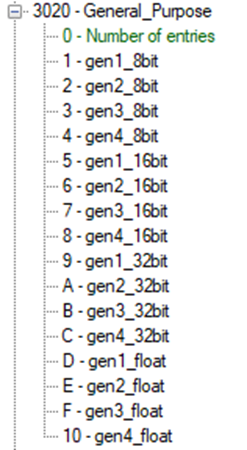
There is no proper debugging mechanism in place; however, utilizing Lua I/O objects and general-purpose CANopen objects, some form of limited debugging is possible. Using the input object, the user can control the flow of the program. The user can also write debug information to the output object. Additionally, all objects at index 0x3020, can be used freely for debugging purposes.
3.3.5 Resource monitor
The resource monitor is used to measure characteristics of the script during compile-time, initialization, and runtime (loop). All available objects relevant to resource monitoring are shown under object 0x2031 and described in Table 53.
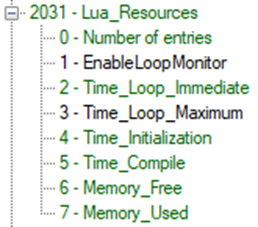
|
Name |
Description |
|
EnableLoopMonitor |
Enable loop resource monitoring which includes execution time and RAM usage. |
|
Time_Loop_Immediate |
Immediate measured loop duration [us]. |
|
Time_Loop_Maximum |
Maximum measured loop duration [us].
This value might sometimes appear unreasonably large that is when task running Lua script gets interrupted by higher priority tasks.
Write 0 to clear value and prepare it for new measurement. |
|
Time_Initialization |
Time [ms] required to execute initialization routine. |
|
Time_Compile |
Time [ms] required to load the script - that is time to script initialization. |
|
Memory_Free |
Immediately available RAM [byte]. |
|
Memory_Used |
Immediately used RAM [byte]. |
Initialization and compile-time measurements are performed every time a new script is downloaded and executed or when an existing script is restarted. Memory and loop time monitoring must be explicitly enabled by setting EnableLoopMonitor to 1. This is because these measurements are calculated every loop, thereby shortening the processing time allocated to the script.
3.4 Using the emdrive Library
3.4.1 Option 1: Automatic Setup
-
Add Code to Script
- In
firstscript.lua, add the following line:
require('emdrive')
- In
-
Apply Path Modification
- A pop-up window will appear in the bottom right corner. Click "Apply and modify."
- After applying, delete the
require('emdrive')line.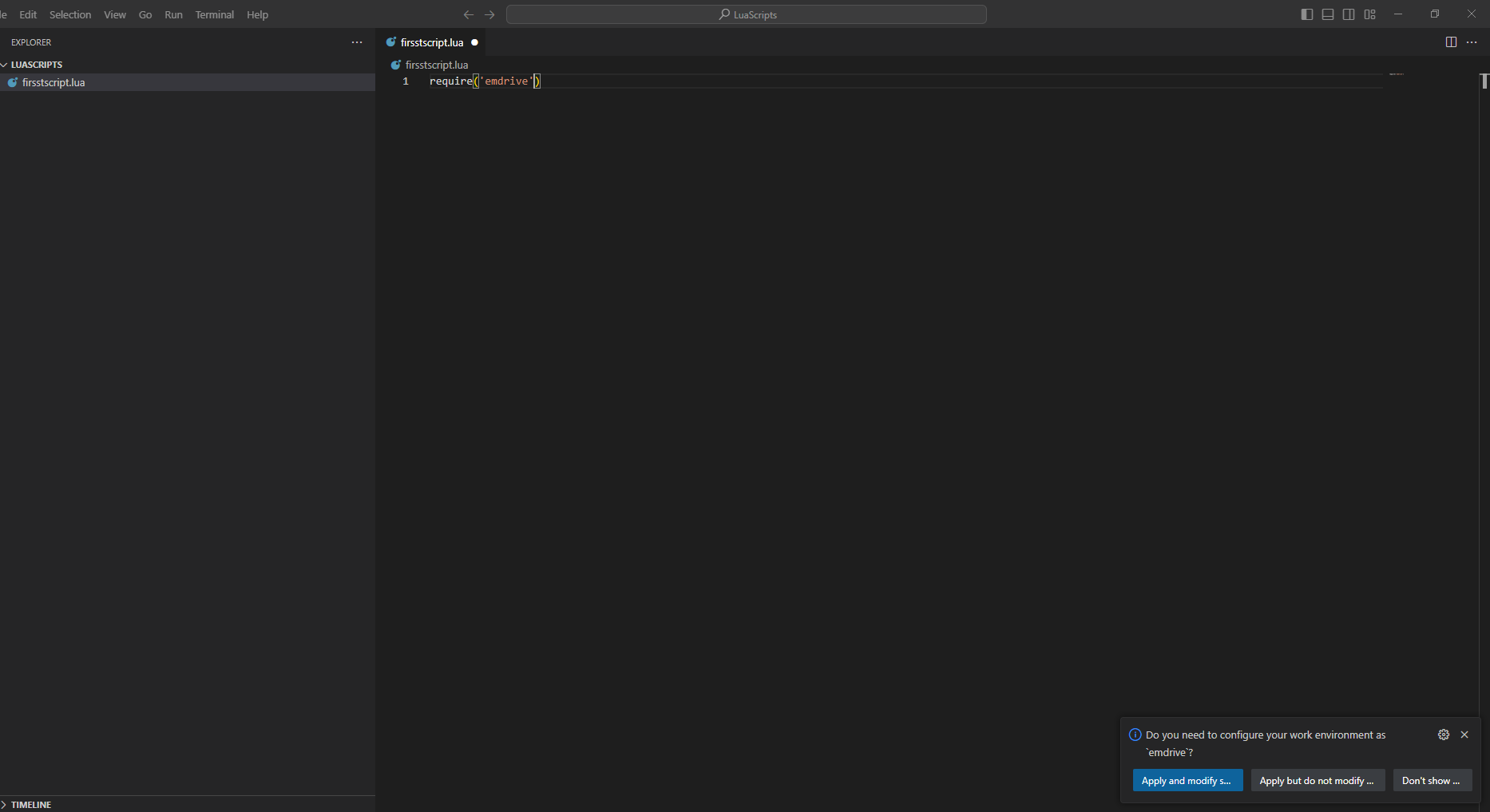
-
Check .vscode Folder
- A new folder named
.vscodewill be created. - Inside, there will be a
settings.jsonfile containing the path to the library.
- A new folder named
3.4.2 Option 2: Manual Setup
-
Create .vscode Folder
- Manually create a
.vscodefolder in your workspace.
- Manually create a
-
Create settings.json File
- Inside the
.vscodefolder, create asettings.jsonfile.
- Inside the
-
Add Library Path to settings.json
- Add the following code to
settings.json:{ "lua.workspace.library": [ "D:/LuaLibraries" ] }
- Add the following code to
4. Examples
4.1 Example 1: "Hello World"
Description:
Print "Hello World" every 100ms to IO_Output.
To make the script work, you need to have two functions: Initialize and Loop.
-
Copy the Code
Copy the following code to an
example.luafile:function Initialize() LoopPeriodMs = 100 end function Loop() IO.Write("Hello World ") end -
Load the Script on the Inverter
- Go to
0x2040 0x05 - Script. - Select "Write from file" and click "...".
- A pop-up window will appear. Locate the saved script and click "Open".
- Click "Write".
- Go to
-
Check if the Script is Valid
- Go to
0x2040 0x02 - Status. - The value "3" indicates the downloaded file is valid.
- Go to
-
Run the Script
- Set
0x2040 0x03 - Controlto2. - If the script is running, the status value should be "5".
- Set
-
View the Output
- Go to
0x2040 0x07 - IO_output. - Click "Read" to see the "Hello World" string in the Description window.
- Go to
4.2 Example 2: Data types & variables
4.2.1 Example 2.1: Data types
Lua is a lightweight, high-level programming language known for its simplicity and flexibility. It has several basic data types, each serving a different purpose. Here are the main data types in Lua along with examples for each:
- Nil
Represents the absence of a value. - Boolean
Represents a boolean value, either true or false. - Number
Represents both integer and floating-point numbers. - String
Represents a sequence of characters. - Table
Represents associative arrays, which can be used as arrays, dictionaries, or other data structures. - Function
Represents a callable function.
function Initialize()
LoopPeriodMs = 100
end
function Loop()
-- 1. Nil
local myVariable = nil
IO.Print(myVariable) -- Output: nil
-- 2. Boolean
local isTrue = true
local isFalse = false
IO.Print(isTrue) -- Output: true
IO.Print(isFalse) -- Output: false
-- 3. Number
local integerNumber = 42
local floatingNumber = 3.14
IO.Print(integerNumber) -- Output: 42
IO.Print(floatingNumber) -- Output: 3.14
-- 4. String
local myString = "Hello, Lua!"
IO.Print(myString) -- Output: Hello, Lua!
-- 5. Table
local myTable = { key1 = "value1", key2 = "value2" }
IO.Print(myTable.key1) -- Output: value1
IO.Print(myTable.key2) -- Output: value2
local arrayTable = { "apple", "banana", "cherry" }
IO.Print(arrayTable[1]) -- Output: apple
-- 6. Function
local function myFunction(a, b)
return a + b
end
IO.Print(myFunction(2, 3)) -- Output: 5
-- 6. Anonymous function
local anonFunction = function(x, y)
return x * y
end
IO.Print(anonFunction(4, 5)) -- Output: 20
end4.2.2 Example 2.2: Variables
- Global variables
Global variables are accessible from anywhere in the program unless shadowed by a local variable of the same name. By default, any variable declared without thelocalkeyword is global.
myGlobalVariable = 10 -- Global variable function printGlobal() print(myGlobalVariable) end printGlobal() -- Output: 10 - Local Variables
Local variables are only accessible within the block or function where they are declared. They help avoid polluting the global namespace and can be used to manage scope more effectively.
local myLocalVariable = 20 -- Local variable function printLocal() local myLocalVariable = 30 -- Local to this function print(myLocalVariable) end printLocal() -- Output: 30 print(myLocalVariable) -- Output: 20 - Table fields
Variables can also be fields of tables, allowing for the creation of more complex data structures like arrays, dictionaries, and objects.
local myTable = { field1 = "Hello", field2 = "World" } print(myTable.field1) -- Output: Hello print(myTable.field2) -- Output: World
Variable scope
- Global Scope: Variables declared outside of any function or block are global by default.
- Local Scope: Variables declared with the
localkeyword within a function, block, or loop are local to that block.
- Global vs. Local
myGlobal = "I am global" function testScope() local myLocal = "I am local" print(myGlobal) -- Accessible print(myLocal) -- Accessible end testScope() print(myGlobal) -- Accessible -- print(myLocal) -- Error: myLocal is not accessible here - Local Variable Shadowing
local x = 5 -- Local variable in the main chunk function shadowTest() local x = 10 -- Local variable in the function print(x) -- Output: 10 end shadowTest() print(x) -- Output: 5
Global variables and tables use a lot of memory, especially in embedded systems. To save memory, it's best to use local variables whenever possible.
If you use a global variable at the start of your code and don't need it later, clear the global variable to free up memory. You can do this by adding the following code:
myGlobalVariable = nil4.3 Example 3: Inputs/Outputs
4.3.1 Example 3.1: Use of digital inputs & outputs
Turn low side 1 - ON when switch on digital pin 1 is switched ON.
function Initialize()
LoopPeriodMs = 10
end
function Loop()
local switch = Digital.Get(DIGITAL_IN_1)
if switch == 1.0 then
Digital.Set(LOW_SIDE_1, 1)
else
Digital.Set(LOW_SIDE_1, 0)
end
end4.3.2 Example 3.2: Use of analog inputs
Print analog value of analog input 1 when switch on digital pin 1 is switched ON.
function Initialize()
LoopPeriodMs = 10
end
function Loop()
local switch = Digital.Get(DIGITAL_IN_1)
if switch == 1.0 then
local rawVal = Analog.Get(ANALOG_IN_1)
IO.Print(rawVal)
end
end4.4 Example 4: Blink LED
4.4.1 Example 4.1: Blink LED - "delay"
Loop period is set to 1000ms
LED is connected on low side 1.
Blink LED every 0.5s with Time.WaitMs().
function Initialize()
LoopPeriodMs = 1000
end
function Loop()
local ledState = Digital.Get(LOW_SIDE_1)
if(ledState == 0.0) then
Digital.Set(LOW_SIDE_1, 1.0)
else
Digital.Set(LOW_SIDE_1, 0.0)
end
Time.WaitMs(500)
endIf we set the LoopPeriodMs to 100ms, the script stops running and shows a status of "6", meaning "Script timed out and was stopped."
Here are the key points to understand:
- Time.WaitMs() Function: This function pauses the script for a specified time. In our example, it pauses for 0.5 seconds.
- LoopPeriodMs Setting: We set the script to loop every 100ms.
- Error Explanation: Since the script must loop every 100ms but pauses for 0.5 seconds, it causes an error.
Important Note: Be very careful when using the Time.WaitMs() function to avoid such errors.
4.4.2 Example 4.2: Blink LED - using loop time
We want the LED to blink every 0.5 seconds, while the main loop runs every 10ms. Here's how we do it:
Main_loop_period = 10
Counter = 1
function Initialize()
LoopPeriodMs = Main_loop_period
end
function Loop()
if ((Counter)*Main_loop_period)%500==0 then
local ledState = Digital.Get(LOW_SIDE_1)
if(ledState == 0.0) then
Digital.Set(LOW_SIDE_1, 1.0)
else
Digital.Set(LOW_SIDE_1, 0.0)
end
end
if Counter<50 then
Counter=Counter+1
else
Counter=1
end
end4.4.3 Example 4.3: Blink LED - using processor time
The script initializes a start time variable and defines two functions. In the Loop function, the script checks if the StartTime is nil and if so, sets it to the current time in milliseconds.
The Loop function then continuously gets the current time in milliseconds. If 500 milliseconds have passed since the StartTime, it resets the StartTime to the current time.
It then gets the state of a digital output LOW_SIDE_1.
If LOW_SIDE_1 is off (state is 0.0), it turns it on (state to 1.0).
If LOW_SIDE_1 is on (state is 1.0), it turns it off (state to 0.0).
This process repeats every 500 milliseconds, toggling the state of LOW_SIDE_1 each time.
StartTime = nil
function Initialize()
LoopPeriodMs = 10
end
function Loop()
--Execute only once at the start of the loop
if(StartTime == nil) then
StartTime = Time.GetMs()
end
--Chechk every loop what is the time
local CurrentTime = Time.GetMs()
if (CurrentTime - StartTime >= 500) then
StartTime = CurrentTime
local ledState = Digital.Get(LOW_SIDE_1)
if(ledState == 0.0) then
Digital.Set(LOW_SIDE_1, 1.0)
else
Digital.Set(LOW_SIDE_1, 0.0)
end
end
end4.5 Example 5: CAN send
4.5.1 Example 5.1: (CAN send simple message)
To send a CAN message every 100ms with an ID of 0x205 and data value 500 using the first 2 bytes, follow these steps:

-
Use Template:
- Start with example 4.3 as a template.
-
Add Variables and Functions:
- Define a
CanIDvariable. - Initialize CAN with the
CAN.Initialize()function.
- Define a
-
Sending Parameters:
- Use the
CAN_TX_ONLYparameter for sending. - Messages will not be extended.
- Set filters to 0 since we are only sending.
- Use the
-
Modify the Code:
- Delete the code for toggling the output.
-
Create Custom Function:
- Create a function that is called every 100ms.
- Name the argument
Data_raw. - Split
Data_rawinto 2 bytes. - Send the data using the
CAN.Send()function.
CanID = 0x205
StartTime = nil
function Initialize()
CAN.Initialize(CAN_TX_ONLY,false,0,0)
LoopPeriodMs = 10
end
function Loop()
--Execute only once at the start of the loop
if(StartTime == nil) then
StartTime = Time.GetMs()
end
--Chechk every loop what is the time
local CurrentTime = Time.GetMs()
if (CurrentTime - StartTime >= 100) then
StartTime = CurrentTime
SendData(500)
end
end
function SendData(Data_raw)
local val = Data_raw
local byte0 = math.floor(val) & 0xFF
local byte1 = (math.floor(val) & 0xFF00) >> 8
CAN.Send(CanID,{byte0,byte1,0,0,0,0,0,0})
end4.5.2 Example 5.2 : CAN send extended message (J1939)
We will do the same as in example 5.1 except we will send an extended message (It will be a J1939 message PH3 - the data order might be different in the standard).
ID = 0x18FF8203.
The only thing we need to change is 2 lines, we need to change the CanID and in the CAN.Initialize() function, the boolean value to true. If we change only the CanID then the message will still be sent out but the ID will be 0x199 (last 3 digits of - ID 0x18FF8199).
CanID = 0x18FF8199
CAN.Initialize(CAN_TX_ONLY,true,0,0)4.6 Example 6: CAN receive
4.6.1 Example 6.1 : CAN receive
In this example we will turn ON and OFF a LED that is connected on low side 1 with a received can message.
The Can ID has to be 0x123 and we will send only one byte of data. If the value of data is 1 then the LED will be turned ON, otherwise it will be turned OFF.
To use the CAN receive function we need to change the CAN.Initialite() and add a function called "CAN.Received(message)". With the following code we always go into the CAN.Received() function when a message is received and then we check if the ID is correct.
function Initialize()
CAN.Initialize(CAN_RX_TX,false,0,0)
LoopPeriodMs = 10
end
function Loop()
end
function CAN.Received(message)
if (message.ID == 0x123) then
IO.Print(" Data1: ", message.Data[1])
if(message.Data[1] == 1) then
Digital.Set(LOW_SIDE_1, 1.0)
else
Digital.Set(LOW_SIDE_1, 0.0)
end
end
endWe can also add a filter so we only go into the CAN.Received() when the message has a proper ID. We achieve this with the following code.
function Initialize()
CAN.Initialize(CAN_RX_TX,false,0x123,0x123)
LoopPeriodMs = 10
end
function Loop()
end
function CAN.Received(message)
--if (message.ID == 0x123) then
IO.Print(" Data1: ", message.Data[1])
if(message.Data[1] == 1) then
Digital.Set(LOW_SIDE_1, 1.0)
else
Digital.Set(LOW_SIDE_1, 0.0)
end
--end
end4.7 Example 7: Read & Set CANopen objects
In this example, we'll use an analog input (HW AIN1) as a throttle to set the motor velocity reference (object 0x3010 0x05). We will also read this object and print its value to the Lua output. Additionally, we'll limit the maximum RPM using the math library to prevent the motor from running away if there's a problem with the analog reading.
0V = 0RPM
5V = 200RPM
For this example to work you need an inverter that is configured to work with the connected motor. You need to be first able to spin it in velocity mode using the configurator.
When you start the script go to operational and turn on PWMs manually.
If the analog throttle is damaged (either a short circuit or a broken circuit), there is no safety system in place. Here’s what can happen:
If the circuit is broken, no voltage will be applied, and the RPM will be 0.
If there is a short circuit, the inverter will receive the full 5V on the analog input, causing the RPM to go to the maximum.
To prevent these issues, we need to add safety features. These will be demonstrated in Example 8.
VelocityRef = {0x3010, 0x05}
function Initialize()
LoopPeriodMs = 10
end
function Loop()
local rpm = Analog.Get(ANALOG_IN_1) * 40
rpm = math.min(rpm,200)
CANopen.SetObjectValue(VelocityRef, rpm)
local VelRef_from_CANopen = CANopen.GetObjectValue(VelocityRef)
IO.Print(VelRef_from_CANopen)
end4.8 Example 8: Demo application
4.8.1 Example 8.1 : Demo application using CANopen objects.
In this example, we will demonstrate how to use the HW AIN1 input for a simple throttle control with a potentiometer (0-5V).
- Throttle Input: HW AIN1 (0-5V Potentiometer)
- Minimum RPM: 0 (corresponds to 0.5V)
- Maximum RPM: 200 (corresponds to 4.5V)
- Motor Stop Conditions:
- If the throttle voltage is below 0.2V or above 4.8V, the motor will stop to protect against short and break issues.
- PWM Enable Condition:
- If the throttle voltage is below 0.5V, the PWM signals will be enabled
function Initialize()
CANopen.SetObjectValue(VelocityRef, 0) -- Set Velocity ref to 0
CANopen.SetObjectValue(ControlMode, 1) -- Set velocity mode
CANopen.SetNMTState(CO_OPERATIONAL) -- Go into operational mode
LoopPeriodMs = 100
end
function Loop()
local throttleVoltage = Analog.Get(ANALOG_IN_1)
-- Decide whether to enable or disable the motor
if Digital.Get(DIGITAL_IN_1) == 1 then
-- only enable if voltage on analog in 1 is < 0.5 V so the motor does not start ang goes to high RPM
if (throttleVoltage < 0.5) then
CANopen.SetObjectValue(PwmControl, 1)
end
else
CANopen.SetObjectValue(PwmControl, 0)
end
if (throttleVoltage > 0.2 and throttleVoltage < 4.8) == true then
-- Map values 0.5 - 4.5 V to 0 - 200 RPM and
local rpm = (throttleVoltage - 0.5) / 4 * 200
rpm = math.min(rpm, 200)
rpm = math.max(rpm, 0)
CANopen.SetObjectValue(VelocityRef, rpm)
else
CANopen.SetObjectValue(VelocityRef, 0)
CANopen.SetObjectValue(PwmControl, 0)
end
end4.8.2 Example 8.2 : Demo application using dedicated motor library.
In this example we will have the same functionality of the code as in example 8.1. but with the use of motor library
With the use of the motor library the code is easier to read and write than example 8.1.
function Initialize()
Motor.SetReferenceVelocity(0) -- Set Velocity ref to 0
Motor.SetControlMode(VELOCITY_MODE) -- Set velocity mode
CANopen.SetNMTState(CO_OPERATIONAL) -- Go into operational mode
LoopPeriodMs = 100
end
function Loop()
local throttleVoltage = Analog.Get(ANALOG_IN_1)
-- Decide whether to enable or disable the motor
if Digital.Get(DIGITAL_IN_1) == 1 then
-- only enable if voltage on analog in 1 is < 0.5 V so the motor does not start ang goes to high RPM
if (throttleVoltage < 0.5) then
Motor.Enable()
end
else
Motor.Disable()
end
if (throttleVoltage > 0.2 and throttleVoltage < 4.8) == true then
-- Map values 0.5 - 4.5 V to 0 - 200 RPM and
local rpm = (throttleVoltage - 0.5) / 4 * 200
rpm = math.min(rpm, 200)
rpm = math.max(rpm, 0)
Motor.SetReferenceVelocity(rpm)
else
Motor.SetReferenceVelocity(0)
Motor.Disable()
end
end4.9 Example 9: Throttle script (state - machine)
Throttle Control
- Adjusting the Throttle: Use the potentiometer connected to Analog_IN_1.
- Protection: The potentiometer is protected against short and break circuits.
- Deadband: A deadband of 0.3V is set for the potentiometer.
- Speed Limits:
- Minimum speed: 0 RPM
- Maximum speed: 300 RPM
Motor Operation
- Activation:
- The motor runs only when digital pin 1 (ON/OFF switch) is connected.
- Change motor direction using a switch on digital pin 3.
- Speed Setting:
- Forward max speed: Object 0x3020 0x0D
- Reverse max speed: Object 0x3020 0x0E
- Switching direction at max speed changes to the corresponding reverse speed.
LED Diagnostics
- LED Indicator (HS1):
- On: System working normally.
- Blinking: System in error mode.
- Error Blink Codes:
- Error 2: Blinks twice, then pauses.
- Error 3: Blinks three times, then pauses.
Voltage and RPM Details
- Working Voltage Range:
- Minimum RPM: at 0.5V
- Maximum RPM: at 4.5V
- Deadband: 0.3V
- Error Conditions:
- ERROR1: Voltage out of bounds
- ERROR2: Analog_IN_1 < (Min_Volt - Deadband)
- ERROR3: Analog_IN_1 > (Max_Volt + Deadband)
CANopen Error Messages
- Error Message (0x80 + nodeID):
- Sent every 100ms in error state.
- Data length: 8 bytes.
- Byte 0 Mapping:
- Bit 0: Throttle potentiometer error out of bounds
- Bit 1: Throttle potentiometer break circuit error
- Bit 2: Throttle potentiometer short circuit error
- Warning Message (0x180 + nodeID):
- Sent every 100ms in start state.
- Data length: 8 bytes.
- Byte 0: Warning code 0x01 (Motor disabled, potentiometer not in min position)
If the motor spins at Forward max speed and you switch the direction with the switch then it will spin at Reverse max speed
-- Limits
MAX_RPM = 300
MIN_RPM = -300
-- Objects
FORWARD_MAX_SPEED_ID = {0x3020, 0xD}
REVERSE_MAX_SPEED_ID = {0x3020, 0xE}
LED_ID = {0x30A4, 0x02}
-- Inputs
ENABLE_SW = DIGITAL_IN_1
DIRECTION_SW = DIGITAL_IN_2
THROTTLE_IN = ANALOG_IN_1
DIRECTION_IN = DIGITAL_IN_3
-- Voltage thresholds
THROTTLE_MIN_V = 0.5
THROTTLE_MAX_V = 4.5
DEADBAND = 0.3
ERROR = 0
ERROR_reg = 0
WARNINGS = 0
StartTime1 = nil
StartTIme2 = nil
StartTime3 = nil
StartTime4 = nil
FlagCounter = 0
DIN = {ON = 1, OFF = 0}
LED = {OFF = 0x0, ON = 0x1}
DIRECTION = {FORWARD = 1, REVERSE = 0}
-- Application FSM
Application = {}
function Initialize()
CAN.Initialize(CAN_TX_ONLY,false,0,0)
Application.NextState = "Idle"
Motor.SetReferenceVelocity(0)
Motor.SetControlMode(VELOCITY_MODE)
LoopPeriodMs = 10
end
function Loop()
Application[Application.NextState]()
end
Application.Idle = function ()
CANopen.SetObjectValue(LED_ID, LED.ON)
CANopen.SetNMTState(CO_OPERATIONAL)
Application.NextState = "Start"
end
Application.Start = function ()
-- IF enable switch is off go to stop state
if (Digital.Get(ENABLE_SW) == DIN.OFF ) then
Application.NextState = "Stop"
return
end
-- Get voltage
local throttleVoltage = Analog.Get(THROTTLE_IN)
-- Go into error state if throttle voltage is out of bounds
if OutOfBounds(throttleVoltage, (THROTTLE_MIN_V - DEADBAND), (THROTTLE_MAX_V + DEADBAND)) == true then
ERROR = (ERROR or 0) | 1
Application.NextState = "Error"
return
end
-- Check that voltage is bellow minimal throttle voltage - so that the motor does not start at high speed
if Motor.GetState() == MOTOR_OFF then
if throttleVoltage < (THROTTLE_MIN_V) then
Motor.Enable()
WARNINGS = WARNINGS & Negate_Xbit(1, 8)
return
else
WARNINGS = (WARNINGS or 0) | 1
end
end
-- Only set velocity reference when pwms are enabled
if ((Motor.GetState() == MOTOR_RUN) and (throttleVoltage >= 0.5)) then
-- Calculate Voltage
--local rpm = ((throttleVoltage - THROTTLE_MIN_V) * MAX_RPM) / (THROTTLE_MAX_V - THROTTLE_MIN_V)
local rpm = ((throttleVoltage - THROTTLE_MIN_V) * GetMaxSpeed()) / (THROTTLE_MAX_V - THROTTLE_MIN_V)
-- Limit RPM
rpm = math.min(rpm, MAX_RPM)
rpm = math.max(rpm, MIN_RPM)
IO.Print("REF: ", rpm)
-- Set ref
Motor.SetReferenceVelocity(rpm)
end
-- Send warnings every 100ms
local CurrentTime = Time.GetMs()
if((StartTIme2 == nil) or (CurrentTime-StartTIme2) >= 100) then
SendWarnings()
end
end
Application.Stop = function ()
Motor.SetReferenceVelocity(0)
Motor.Disable()
--When eneble sw is activated go to start state
if (Digital.Get(ENABLE_SW) == DIN.ON) then
Application.NextState = "Start"
end
end
Application.Error = function ()
Motor.Disable()
Motor.SetReferenceVelocity(0)
--local ledValue = CANopen.GetObjectValue(LED_ID)
local throttleVoltage = Analog.Get(THROTTLE_IN)
local ErrorBlinkCounter = 0
local CurrentTime
--If bit 0 = 1 then OutOfBounds is detected
if (ERROR & 1) == 1 then
if throttleVoltage < (THROTTLE_MIN_V - DEADBAND) then
ERROR = ERROR | 2
ERROR_reg = ERROR_reg | 1 -- set the generic error register
elseif throttleVoltage > (THROTTLE_MAX_V + DEADBAND) then
ERROR = ERROR | 4
ERROR_reg = ERROR_reg | 1 -- set the generic error register
else
-- Clear ERROR bit 0, 1, 2
ERROR = ERROR & Negate_Xbit(7, 16)
-- Clear the generic error register
ERROR_reg = ERROR_reg | Negate_Xbit(1, 8)
end
end
-- Send Errors every 100ms
CurrentTime = Time.GetMs()
if ((StartTime1 == nil) or (CurrentTime - StartTime1) >= 100) then
StartTime1 = CurrentTime
SendError()
end
-- Determine how many times we want to blink the led
if ((ERROR & 2) >> 1) == 1 then
ErrorBlinkCounter = 2
elseif ((ERROR & 4) >> 2) == 1 then
ErrorBlinkCounter = 3
end
-- Start the blinking cycle if enough time has passed
CurrentTime = Time.GetMs()
if StartTime3 == nil or (CurrentTime - StartTime3) >= 3000 then
StartTime3 = CurrentTime
FlagCounter = 0
end
-- Handle the blinking logic
if FlagCounter < 2 * ErrorBlinkCounter then
if StartTime4 == nil or (CurrentTime - StartTime4) >= 300 then
StartTime4 = CurrentTime
FlagCounter = FlagCounter + 1
-- Toggle LED
--if ledValue == 0 then
if FlagCounter % 2 == 1 then
CANopen.SetObjectValue(LED_ID, LED.ON)
else
CANopen.SetObjectValue(LED_ID, LED.OFF)
end
end
else
-- Ensure the LED is off during the pause period
CANopen.SetObjectValue(LED_ID, LED.OFF)
end
if ERROR == 0 then
FlagCounter = 0
Application.NextState = "Idle"
return
end
end
function GetMaxSpeed()
if Digital.Get(DIRECTION_IN) == DIRECTION.FORWARD then
return CANopen.GetObjectValue(FORWARD_MAX_SPEED_ID)
end
return CANopen.GetObjectValue(REVERSE_MAX_SPEED_ID)
end
function SendError()
-- Send on ID + nodeID; we get the NodeId from CANopen off the inverter
local CanID = 0x80 + CANopen.GetObjectValue({0x100B, 0x00})
local byte0 = ERROR & 0xFF
local byte1 = (ERROR & 0xFF00) >> 8
local byte2 = ERROR_reg & 0xFF
CAN.Send(CanID,{byte0, byte1, byte2, 0, 0, 0, 0, 0})
end
function SendWarnings()
-- Send on PDO + nodeID;
local CanID = 0x180 + CANopen.GetObjectValue({0x100B, 0x00})
local byte0 = WARNINGS & 0xFF
CAN.Send(CanID,{byte0, 0, 0, 0, 0, 0, 0, 0})
end
function OutOfBounds(throttleVoltage, minVal, maxVal)
if (throttleVoltage < minVal) or (throttleVoltage > maxVal) then
return true
else
return false
end
end
--- Fuctino to negate bits
---@param value number Value to negate
---@param xBit number Number of bites e.g 16bit => xBit = 16
function Negate_Xbit(value, xBit)
local negated = 0
for i = 0, (xBit - 1) do
if (value & (1 << i)) == 0 then
negated = negated + (1 << i)
end
end
return negated
end5. Benchmark
5.1 Examples for benchmark:
5.1.1 00_Empty_script
function Initialize()
LoopPeriodMs = 10
end
function Loop()
end5.1.2 01_GetObject
function Initialize()
LoopPeriodMs = 10
end
function Loop()
for i = 1,100 do
CANopen.GetObjectValue({0x30B0, 0x04})
end
end5.1.3 02_GetObject_with_library
function Initialize()
LoopPeriodMs = 10
end
function Loop()
for i = 1,100 do
Digital.Get(DIGITAL_IN_4)
end
end5.1.4 03_GetSet
function Initialize()
LoopPeriodMs = 10
end
function Loop()
for i = 1,50 do
local throttle = CANopen.GetObjectValue({0x3090, 0x01})
CANopen.SetObjectValue({0x3010, 0x05}, throttle * 40) --at 4.5V = 180RPM
end
end5.1.5 04_GetSet_with_library
function Initialize()
LoopPeriodMs = 10
end
function Loop()
for i = 1,50 do
local throttle = Analog.Get(ANALOG_IN_1)
Motor.SetReferenceVelocity(throttle * 40) --at 4.5V = 180RPM
end
end5.2 Results
We loaded each script onto the inverter and started the "Resource Manager." We ran the script for a specific period and logged the variables to a live chart, from which we then created the following table:
Examples from 05 onwards can be found under the title 4. Examples.
| RAM usage [kB] | RAM free [kB] |
RAM used [%] |
Avg. loop duration [us] | Compile time [ms] | Initialization time [ms] |
|
| 00_Empty_script | 11.800 |
24.040 |
33 | 13 | 2.7 | 0.175 |
| 01_GetObject | 11.728 | 24.112 | 33 | 5000 | 2.9 | 0.173 |
| 02_GetObject_with_library | 11.784 | 24.056 | 33 | 510 | 2.94 | 0.241 |
| 03_GetSet | 12.088 | 23.752 | 34 | 5000 | 3.178 | 0.177 |
| 04_GetSet_with_library | 12.128 | 23.712 | 34 | 450 | 3.149 | 0.174 |
| 05_Timer_example_4_1 | 12.064 | 23.776 | 34 | 500407 | 3.294 | 0.242 |
| 06_Timer_example_4_2 | 12.200 | 23.640 | 34 | 17 | 3.669 | 0.177 |
| 07_Timer_example_4_3 | 12.232 | 23.608 | 34 | 19 | 3.747 | 0.175 |
| 08_Example_5 | 12.104 | 23.736 | 34 | 18 | 4.332 | 0.213 |
| 09_Example_6 | 15.512 | 20.328 | 43 | 9 | 3.468 | 0.225 |
| 10_Example_7 | 22.048 | 12.792 | 63 | 125 | 3.506 | 0.191 |
| 11_Example_8_1 | 13.472 | 22.368 | 38 | 110 | 5.030 | 0.293 |
| 12_Example_8_2 | 13.072 | 22.768 | 36 | 50 | 4.628 | 0.250 |
| 13_Example_9 | 21.112 | 14.728 | 59 | 250 |
15.756 |
0.742 |
![Ram used [%]](http://help.emsiso.com/uploads/images/gallery/2024-07/embedded-image-3chsvi0d.png)
![Average loop time [us]](http://help.emsiso.com/uploads/images/gallery/2024-07/embedded-image-znzcz6k9.png)
Examples 01, 03, and 05 have too much loop time and were excluded from the chart.
As you can see from the table and charts, reading and writing values directly from the CANopen stack takes longer than using our library. For example, the 01_GetObject example has an average loop time execution of 5ms, whereas the 02_GetObject_with_library example has an average time of 510µs, which is approximately 10 times faster. Based on these results, it is better to use functions that directly interact with the inverter instead of the CANopen stack, where possible.
We can also see that the delay function used in example 05_Timer_example_4_1 has a very long loop time because we used the delay to blink an LED. This function must be used with caution and only for small delays if you have no other option.
For writing applications, we recommend using a state machine, which is more reliable. With a state machine, you have more control over what happens in each state and can properly define the transitions between states.
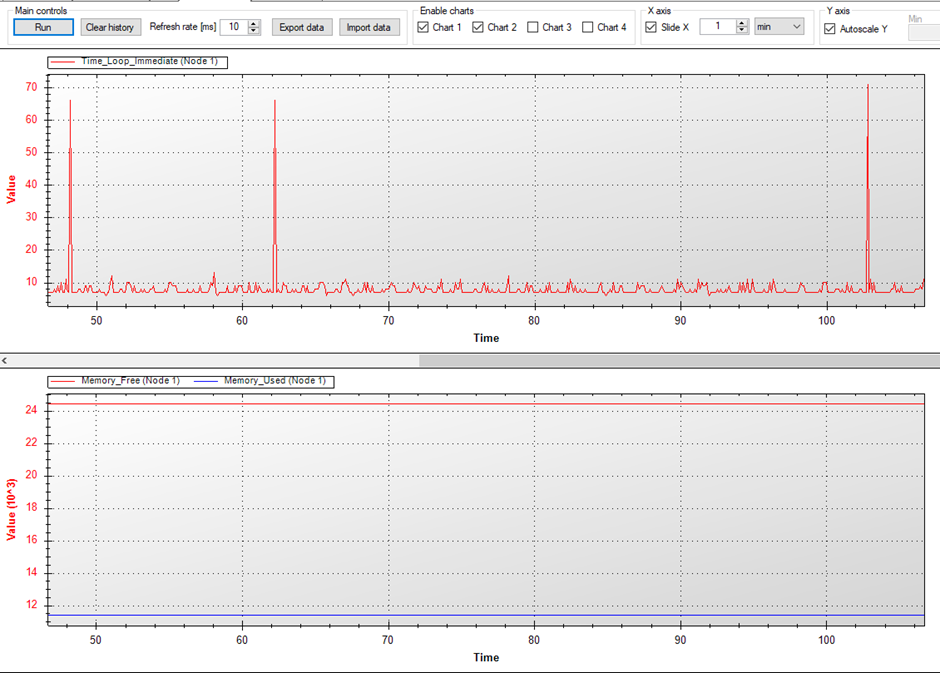
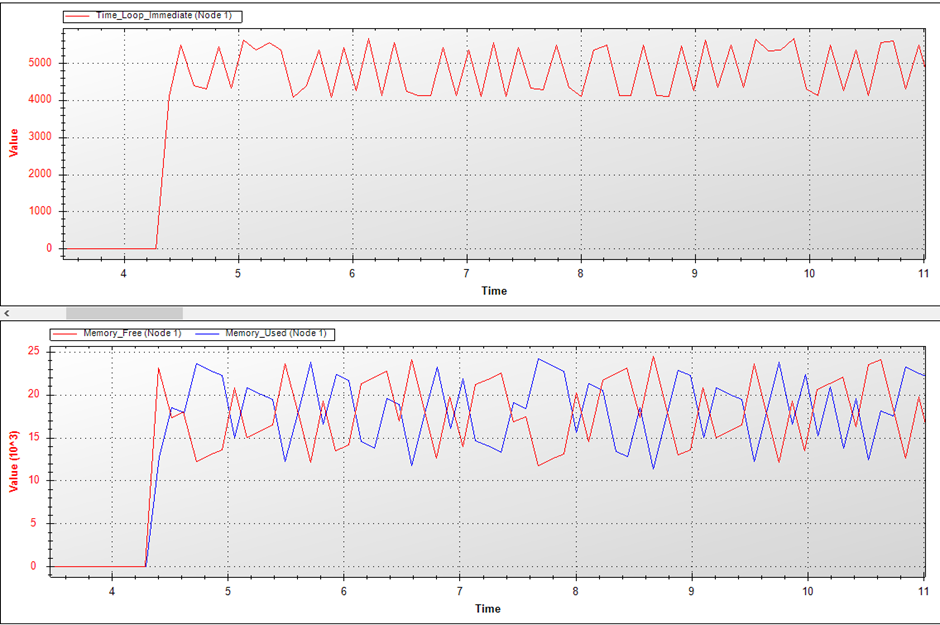
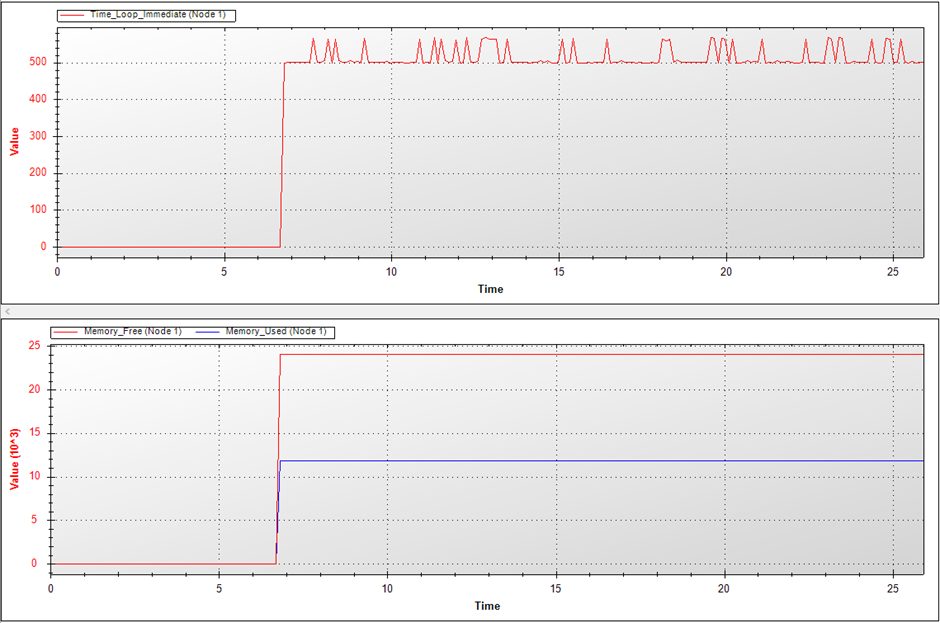
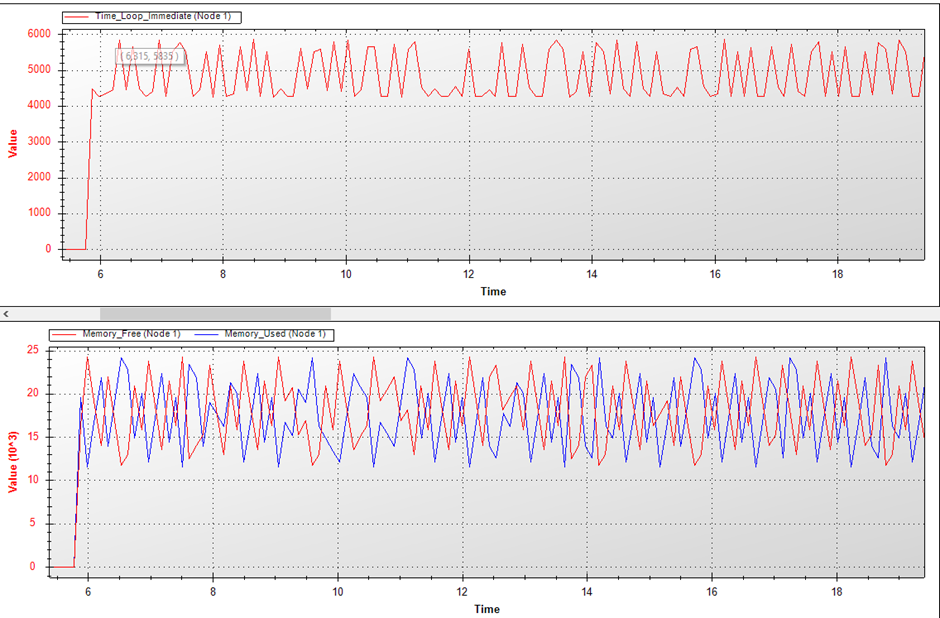
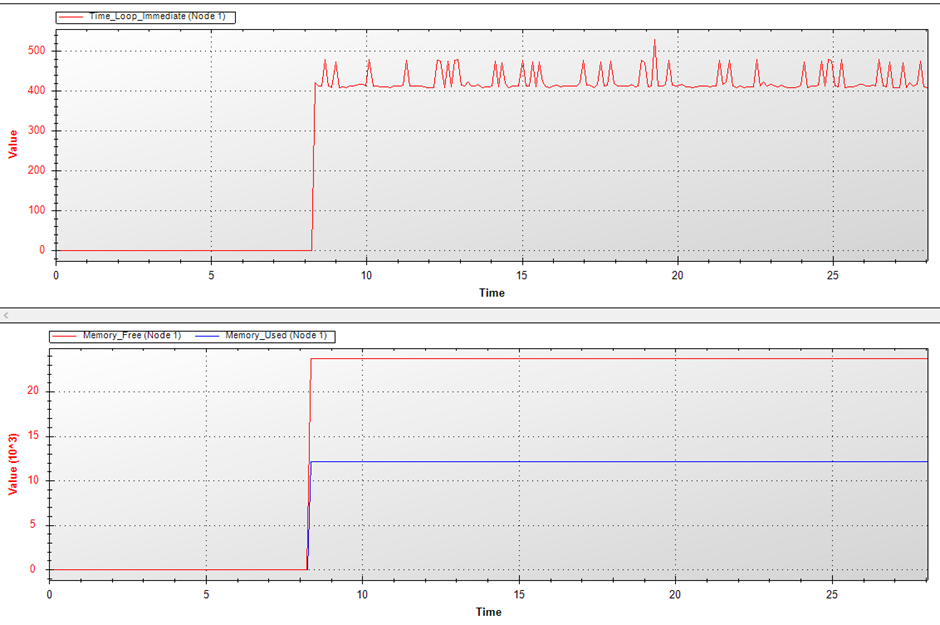
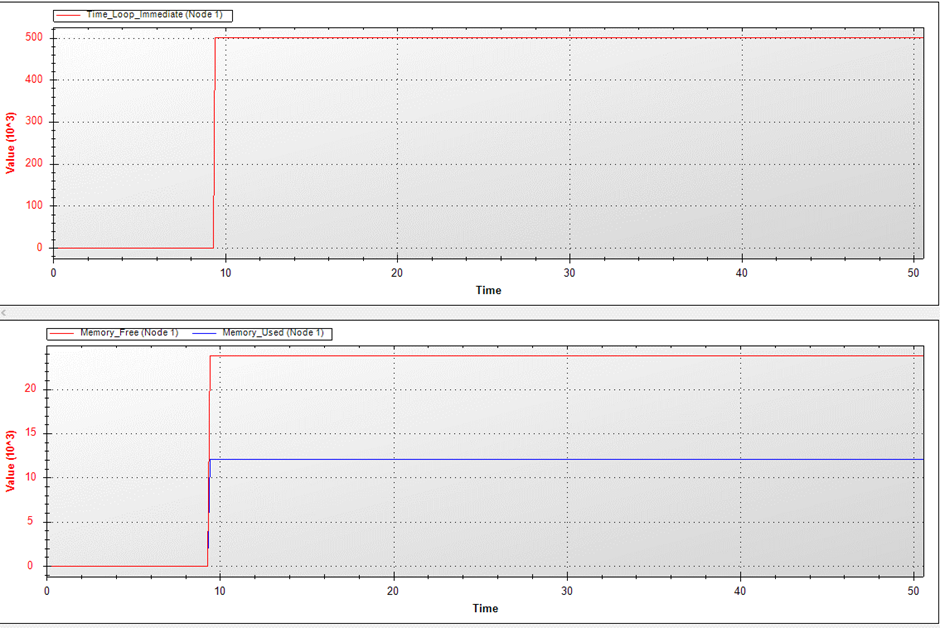
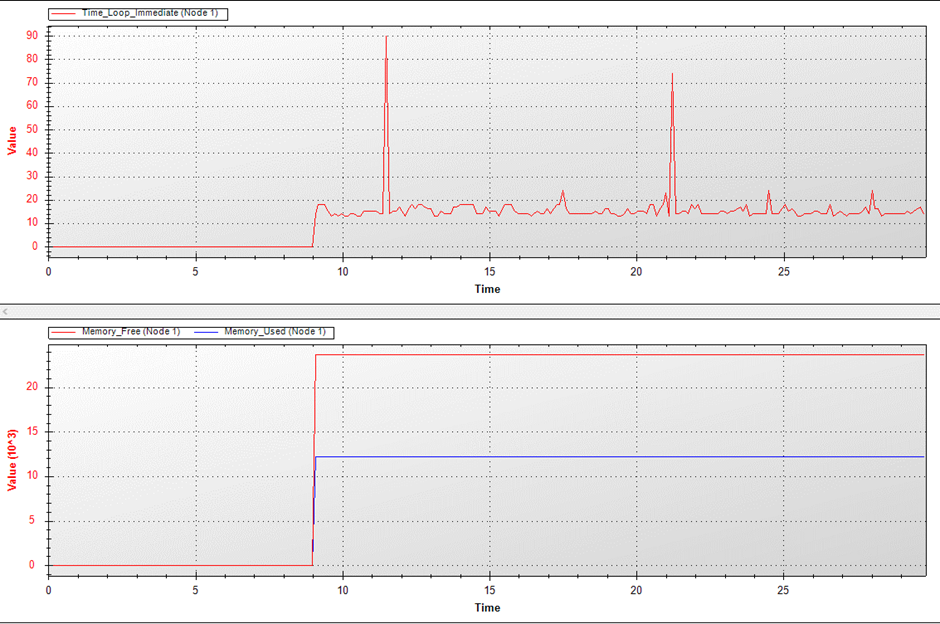
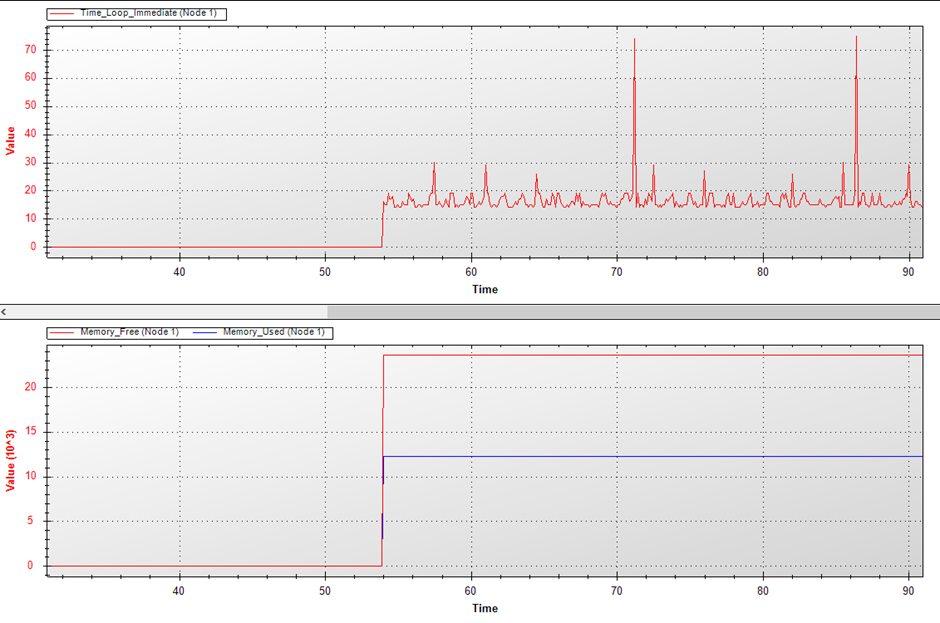
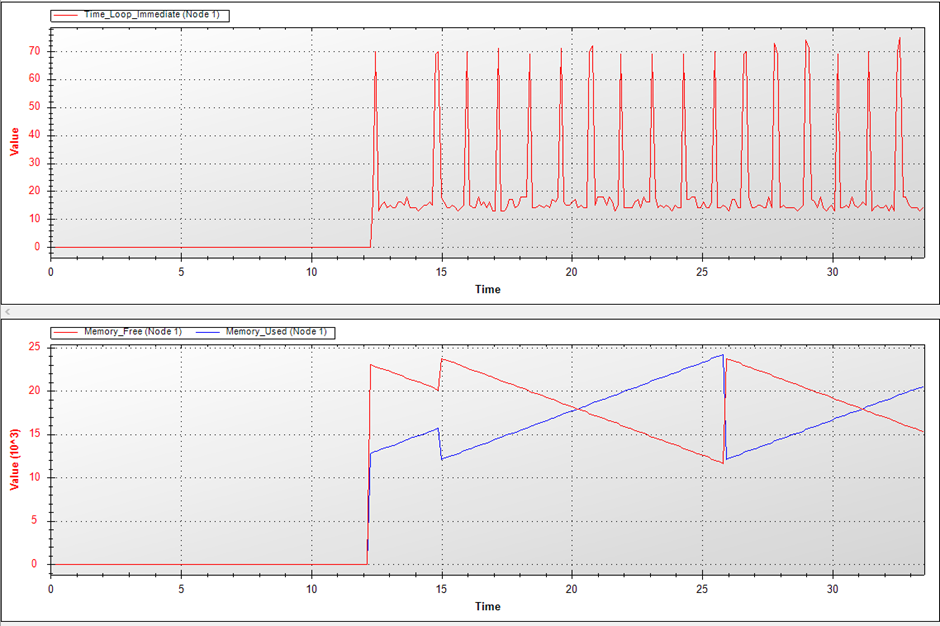
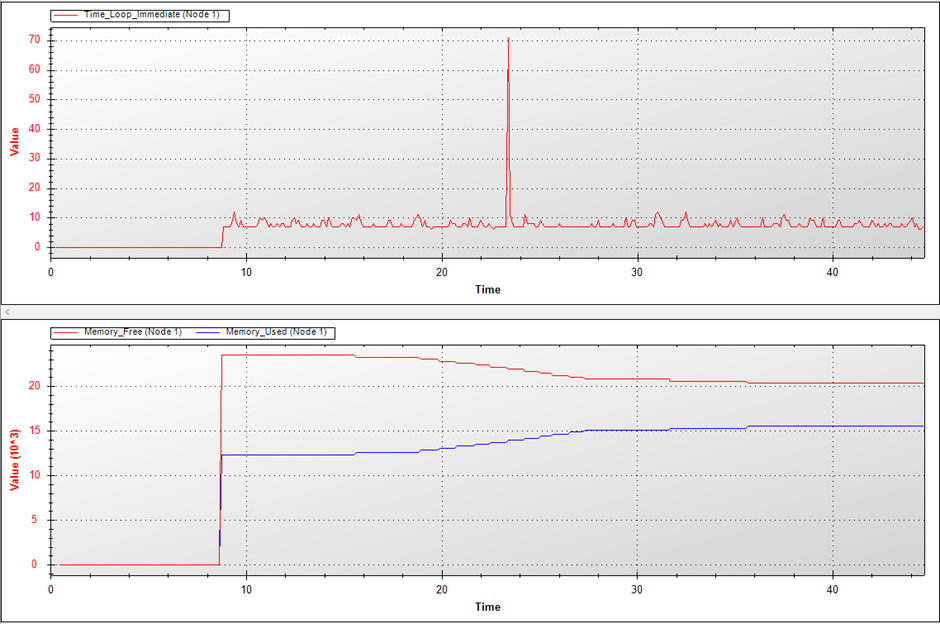
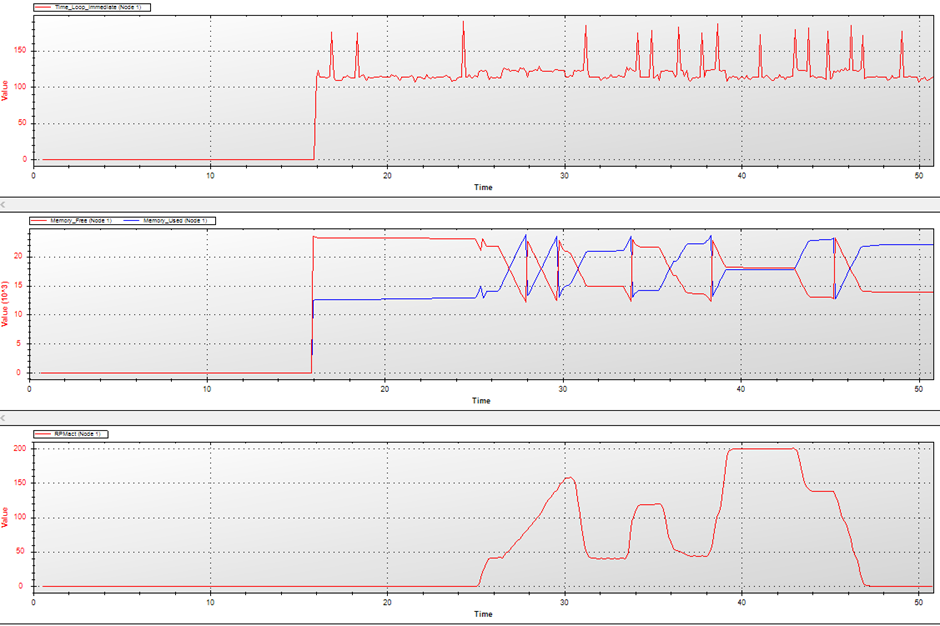
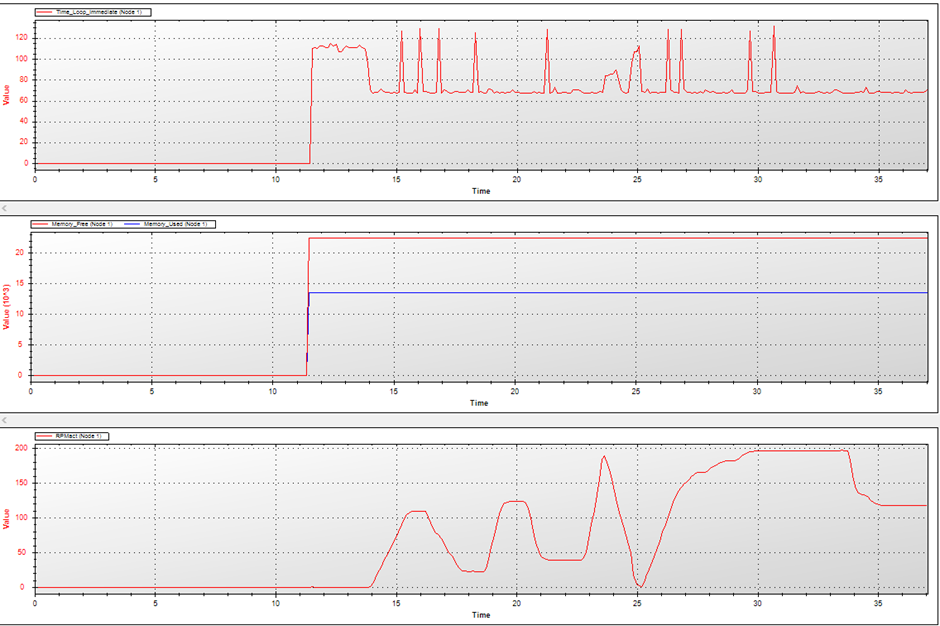
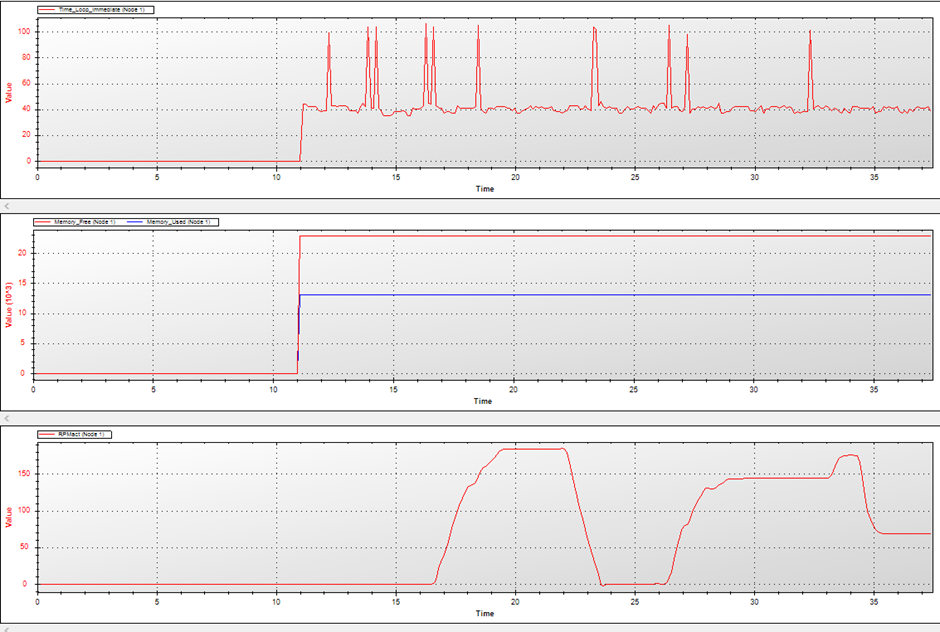
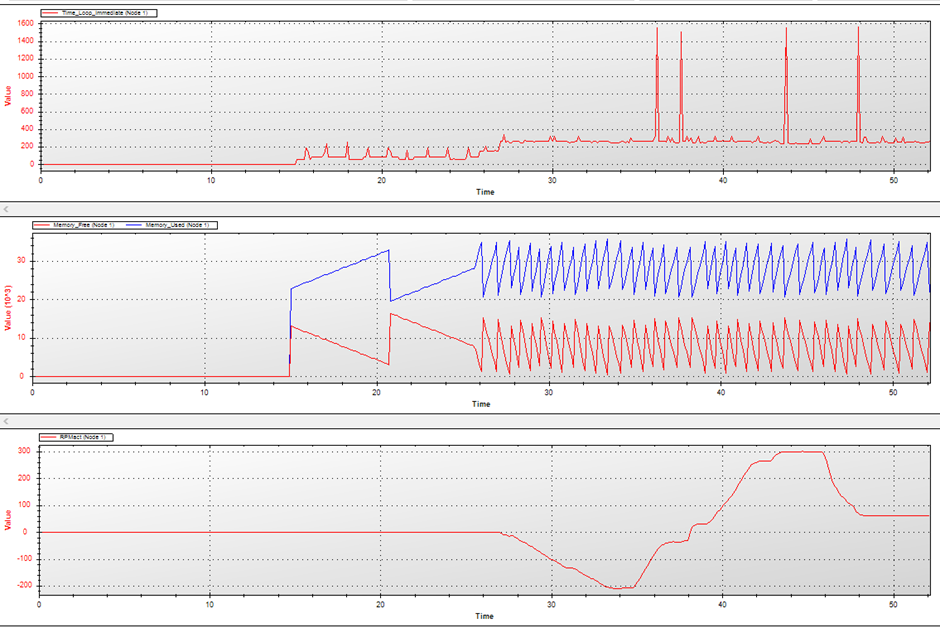
In section "5.3 Live chart data for each example", we can see the loop time, RAM used and RAM free for a specific time period. We can se that we have some spikes in loop time, which can indicate that some specific part of the code was executed or that the script was interrupted with a higher priority task. We can also see that the RAM usage can very based on which part of the code is executed.
5.3 Live chart data for each example
5.3.1 00Empty_script:
5.3.2 01GetObject:
5.3.3 02GetObject_with_library:
5.3.4 03GetSet:
5.3.5 04GetSet_with_libary:
5.3.6 05Timer_example_4_1:
5.3.7 06Timer_example_4_2:
5.3.8 07Timer_example_4_2:
5.3.9 08Example_5:
5.3.10 09Example_6:
5.3.11 10Example_7:
5.3.12 11Example_8_1:
5.3.13 12Example_8_2:
5.3.14 13Example_9:
5.4 Global variables benchmark
In this chapter, we will demonstrate how the number of global variables affects script RAM usage and loop execution time.
Below is the code that will be used to test 10 global variables. We will increase the number of global variables to 20, 30, 100, and 150, but the principle will remain the same
Global1 = 1
Global2 = 1
Global3 = 1
Global4 = 1
Global5 = 1
Global6 = 1
Global7 = 1
Global8 = 1
Global9 = 1
Global10 = 1
function Initialize()
LoopPeriodMs = 10
end
function Loop()
IO.Print(Global1)
IO.Print(Global2)
IO.Print(Global3)
IO.Print(Global4)
IO.Print(Global5)
IO.Print(Global6)
IO.Print(Global7)
IO.Print(Global8)
IO.Print(Global9)
IO.Print(Global10)
endIn the table below, we recorded the data for different sets of global variables. We can observe that as the number of global variables increases, the compile time, initialization time, loop execution time, and RAM usage all increase. It is important to remember that we are limited by the loop execution time set in the initialize() function. If we exceed that time, we encounter an error.
More importantly, we need to carefully manage the number of global variables because excessive use can lead to memory overflow. As shown in the table below, having 150 global variables consumes around 75% of the RAM, but our code has almost no functionality. If we add the following code right after the Loop() function:
for i = 1,50 do
local throttle = CANopen.GetObjectValue({0x3090, 0x01})
CANopen.SetObjectValue({0x3010, 0x05}, throttle * 40) --at 4.5V = 180RPM
endWe see that the RAM usage jumps to 98%. This shows that RAM usage depends not only on the number of global variables but also on the quality of the code itself. Therefore, we need to write efficient code, which means avoiding the use of global variables, using local variables, and implementing proper algorithms.
| RAM usage [kB] | RAM free [kB] |
RAM used [%] |
Avg. loop duration [us] | Compile time [ms] | Initialization time [ms] |
|
| 10 globals |
12.656 | 23.184 | 35 | 200 | 3.874 | 0.257 |
| 20 globals | 14.480 | 21.360 | 40 | 380 | 4.942 | 0.412 |
| 30 globals | 14.688 | 21.152 | 41 | 650 | 6.018 | 0.591 |
| 100 globals | 25.408 | 10.432 | 71 | 2000 | 13.5 | 0.795 |
| 150 globals | 26.976 | 8.864 | 75 | 3110 | 18.4 | 1.276 |
| 150 globals + 4 lines of code | 35.072 | 768 | 98 | 8000 | 18.9 | 1.213 |
6. Best practices
For further insights and practical tips, I recommend exploring "Programming in Lua," available at: Programming in Lua. Authored by experts in the field, this comprehensive resource offers invaluable guidance for Lua developers. It's worth noting that the entire topic is accessible free of charge as of April 24, 2024. Additionally, some sections of the topic include examples to further illustrate key concepts and techniques.
6.1 Minimizing Global Variables
The most common problem with Lua scripting occurs when the script becomes "big" and the programmer uses only or to much global, resulting in an "out of memory" error. In Lua scripting, it's imperative to exercise caution with global variables to prevent memory exhaustion and script failures, especially on embedded systems. Emphasizing the utilization of local variables whenever possible is paramount. By minimizing global variable usage, we mitigate the risk of memory overflow and enhance script performance.
7. Known issues and limitations
This section describes known issues and limitations, their causes, and solutions or mitigations if they exist.
7.1 Issues
7.1.1 Lua is not enabled
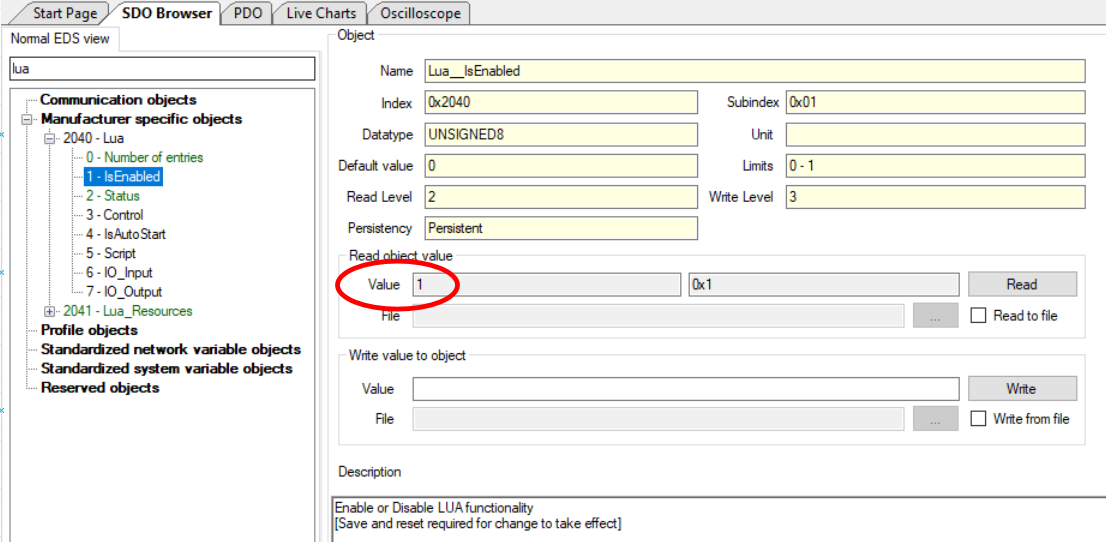
Error 0x06070010 when loading a script may indicate Lua object 0x2040 0x01 isn't set to 1. To resolve, ensure proper access level in Configurator to unlock this feature. If you do not have the proper access level contact us.
7.1.2 Output object out of memory error
When reading an output object whose value is periodically changing by the script, it is possible that an "Out of memory" error, as shown in Figure 8, may be reported by the emDrive Configurator.
Cause: unsynchronized reading and writing to output object by script and emDrive Configurator at the same time.
Solution: read output object again.
7.1.3 IO.Print() isn't functioning
If IO.Print() isn't functioning, it may signal an outdated firmware version. Firmware 0x10C01 lacks support, while 0x10D02 enables the function.
7.1.4 Protections
If multiple protections are active, the CANopen read wont work for the protection object. (New FW will fix this issue)