How to use Lua scripts
SetupFirst use
For
Setting Up Lua scripting,Scripting Iwith suggestVisual utilizingStudio Code
To make Lua scripting easier, follow these steps to set up Visual Studio Code with the Lua extensionextension:
-
ThisInstall
extensionVisualenablesStudioautocompleteCodefunctionality,- If you
willdon't haveemdriveitlibraryyet,storeddownload(e.g.andD:\LuaLibraries)
install Visual Studio Code.
leveraging our library file for enhanced productivity. First create a dedicated folder where - If you
-
After that you need to configureAdd thedeveloperLuamodeExtensionand- Open
theVisualpathStudio Code. - Go to the
libraryExtensionsinviewvs(clickcode,on the square icon on the sidebar or pressCtrl+Shift+X). - Search for "Lua" and install the Lua extension by sumneko.
add - Open
-
Create a Folder for Libraries
- Make a new folder on your computer to
dostorethatthe emdrive library. For example, youneedcan name itD:\LuaLibraries.
- Make a new folder on your computer to
-
Configure Developer Mode and Add Library Path
- Open Visual Studio Code.
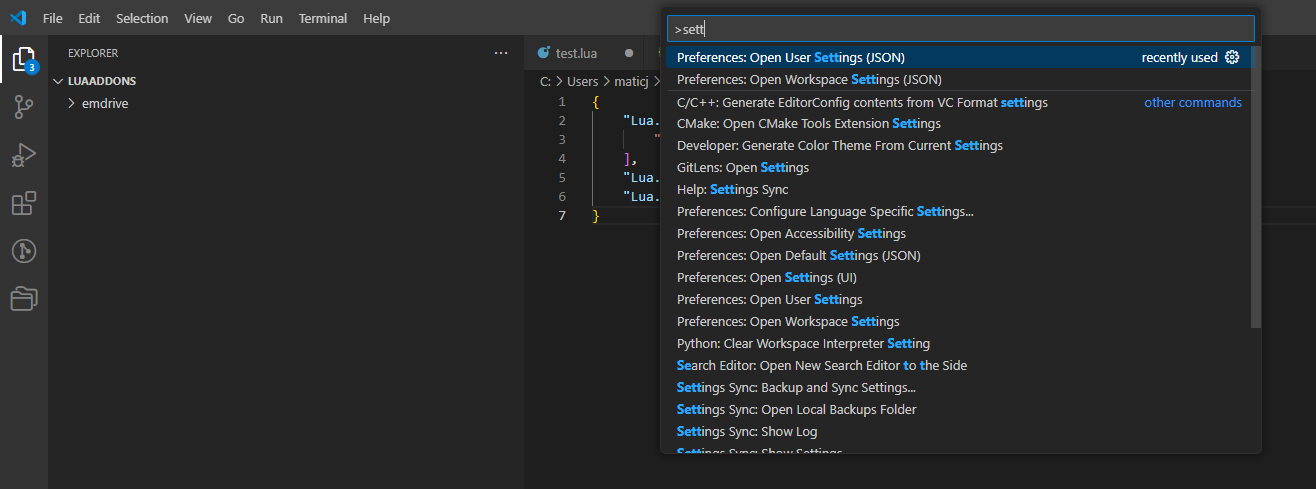
- Press
Ctrl+Ptohave VS-Codeopenand click CTRL+P. Athe searchbarbar. - Type
appear>settingswhere you need to write: ">settings", then youand select "Open User Settings (JSON)"like shown infrom thepicturelist.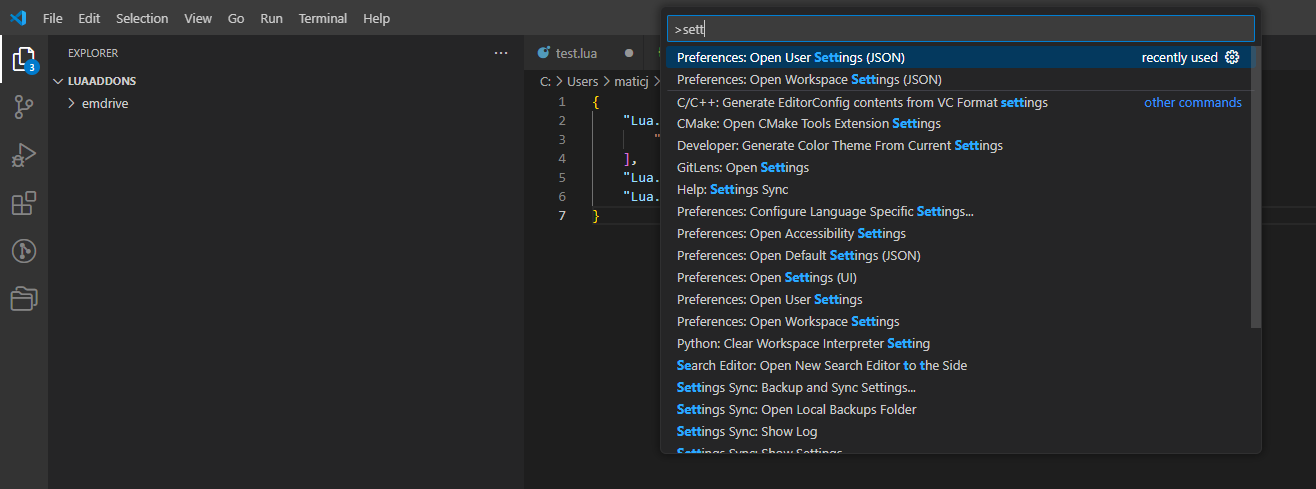
willbellow: -
Edit User Settings (JSON)
- In the opened
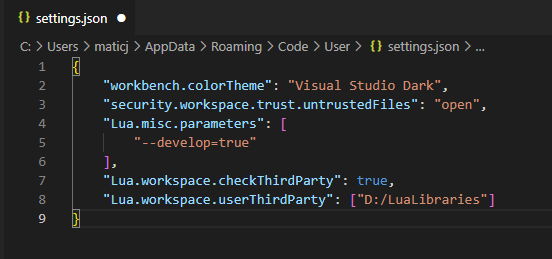
filesettings.jsonyou need tofile, add the followingcode (remember if you have anything written inside you need to leave it):
code.For- Make
examplesurewetohadkeeptheanyfirstexisting3codelinesintact.already in the settings.json, so I addedAdd a","comma at the end of the last line3of the existing code, then paste the new code below it. Update the path to match your folder (D:/LuaLibraries). Use forward slashes instead of backslashes.Save and
thenClosepasted- Save the
upper code in the next (line 4). I only changed the path, which in my case was D:\LuaLibraries. It is importantchanges tochange all backslashes with forward slashes. After you have edited thesettings.json. - Close
needVisualtoStudiosaveCode.
youitandcloseVS-Code.NowExample
youofare ready to use our library.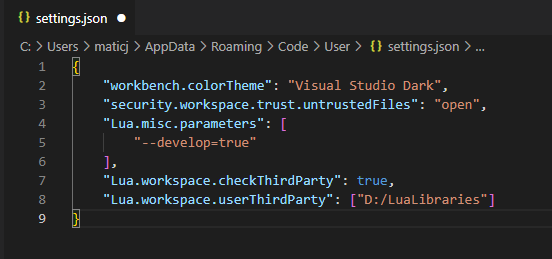
TostartGetting
scriptingStartedyouwithneedLuatoScriptingfirst-
Create a New Folder
- Make a new folder for your project.
-
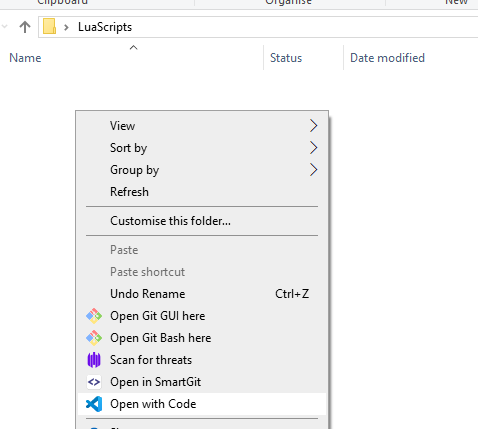
Open the Folder with Visual Studio Code
- Right-click the folder and
thenselectopen up the folder, where you right click"Open withCode,Code."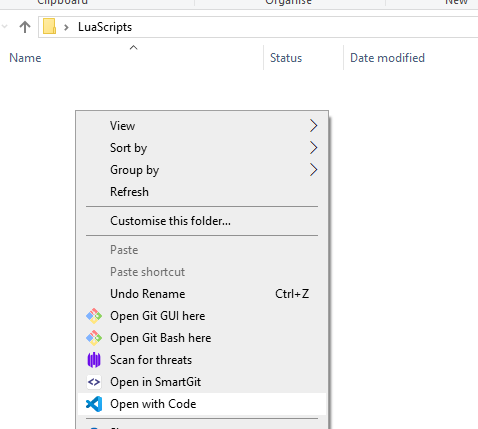
- This will open
theVisualVS-codeStudioeditorCodeandwith your new folder as theworkspaceworkspace.
thiswillbe - Right-click the folder and
-
prepared.Create a New Lua Script
- In the
explorerExplorer windowrightof Visual Studio Code, right-click andcreateselecta"NewnewFile."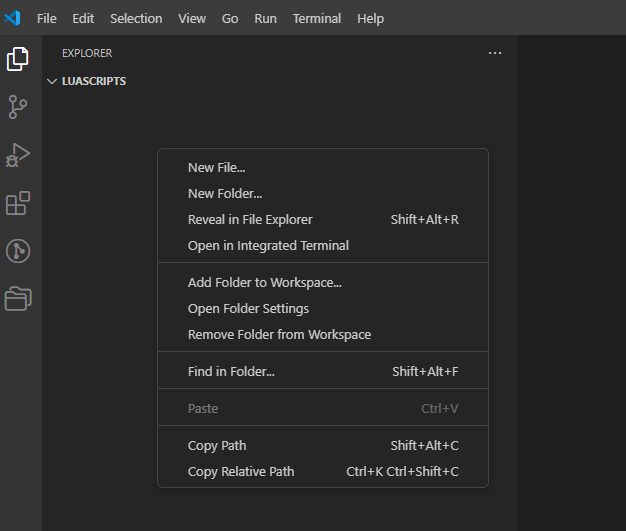
- Name the file
calledfirstscript.lua.
- In the
createalreadyUsing the emdrive Library
Option 1: Automatic Setup
-
AddWhen you have a new workspace (new folder) where you will needCode touse our emdrive library you need to tell VS-code the path. To do this you have 2 options.
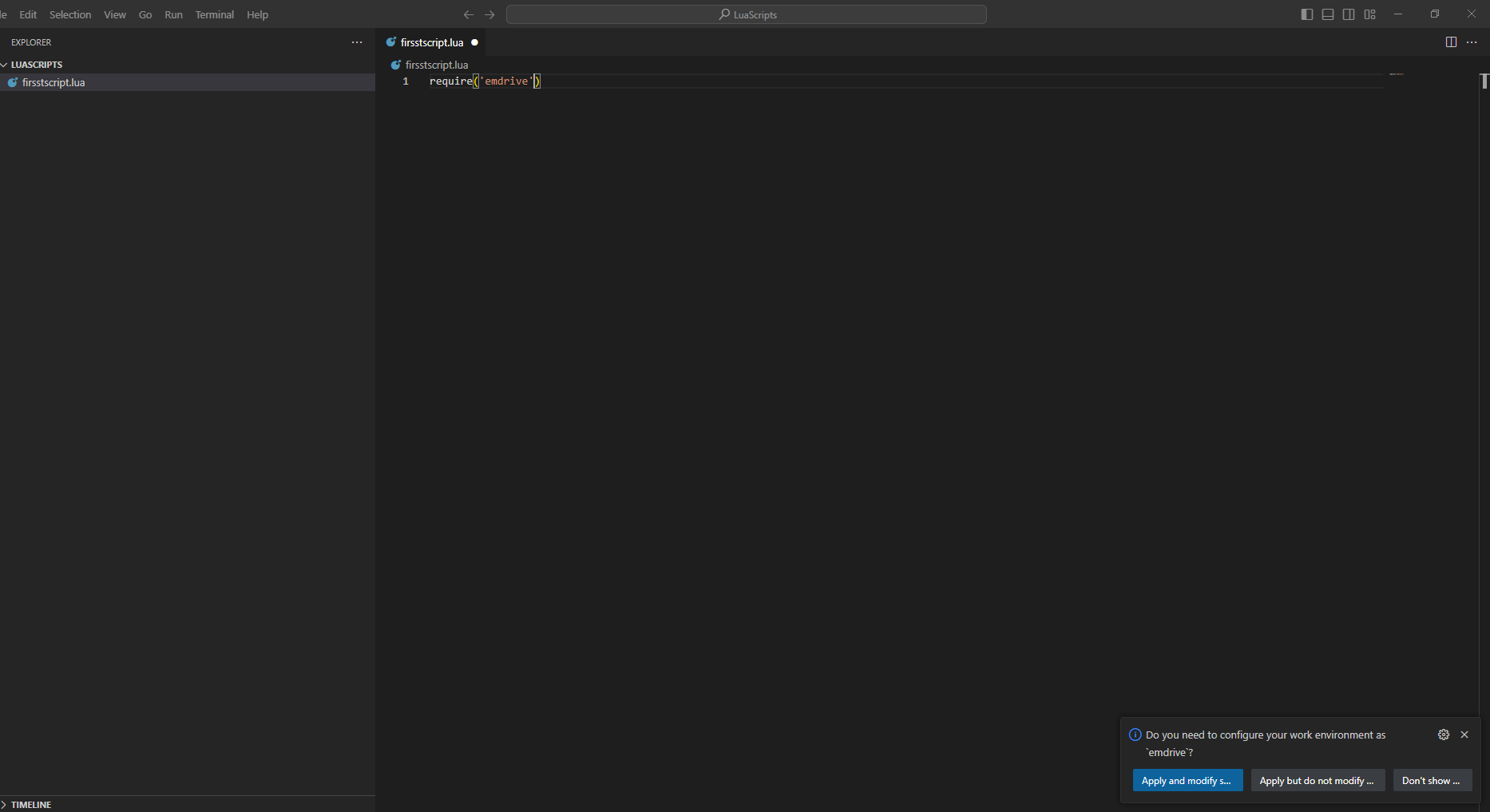
ScriptFirst- In
isfirstscript.lua,to writeadd the followingcode in the empty script.lua (or in this example firstscript.lua)line:
require('emdrive')
option - In
-
Apply Path Modification
- A
poppop-up window will appear in the bottom rightcorner,corner.where you clickClick "Apply andmodify".modify." - After
that you need toapplying, delete therequire('emdrive')line.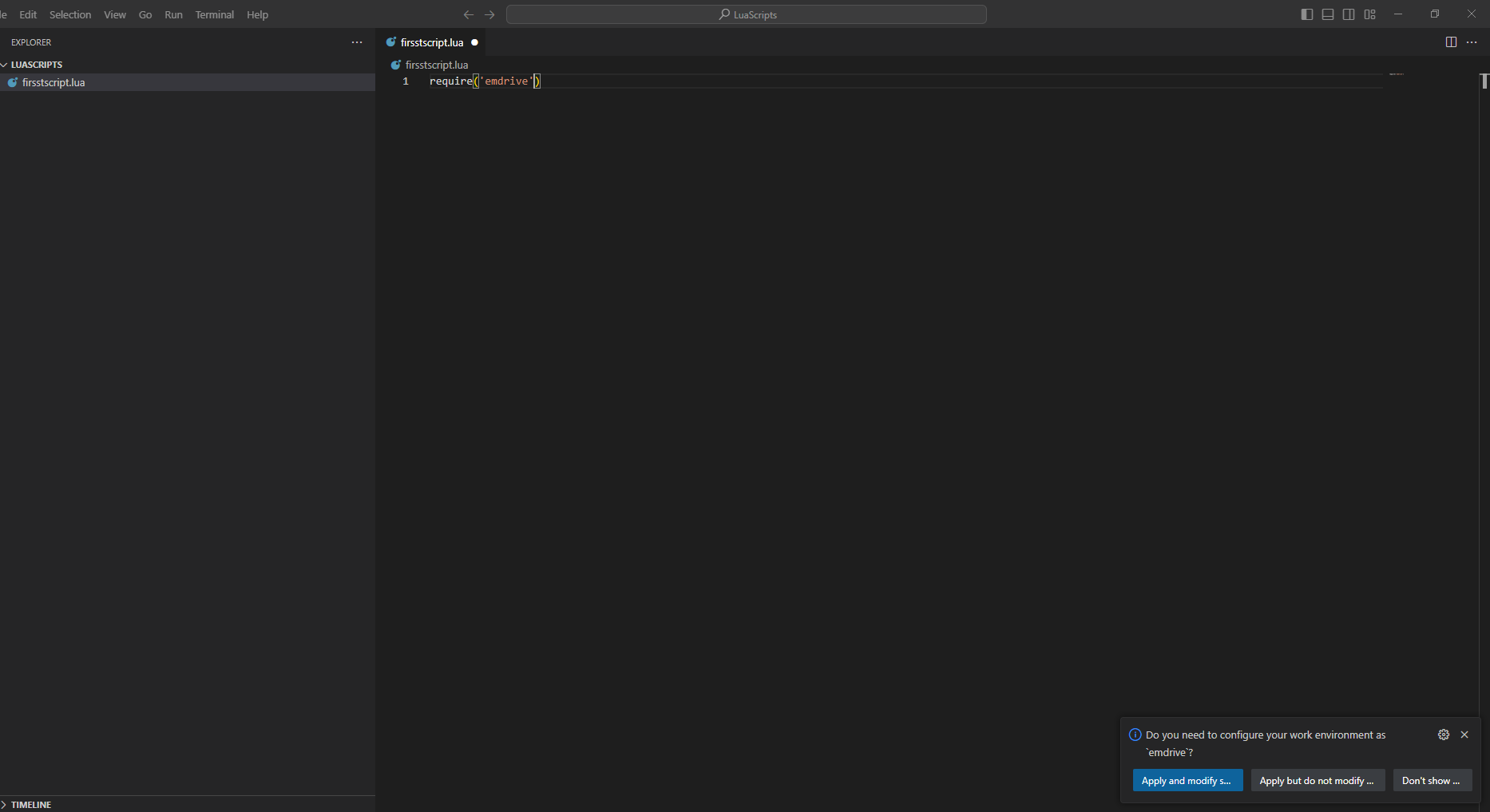
- A
-
Check .vscode
IfFolderyou- A new folder
namesnamed.vscode.vscodeInwillthatbefoldercreated. - Inside, there
iswill be asettings.jsonwhichfilecontainscontaining the path to the library.
look closely when clicked apply you get aThesecond - A new folder
optionisOption 2: Manual Setup
-
Create .vscode Folder
- Manually create a
.vscodefolder in your workspace.
- Manually create a
-
Create settings.json File
- Inside the
.vscodefolder, create asettings.jsonfile.
- Inside the
-
Add Library Path to
createsettings.json- Add the
mentionedfollowingfoldercodeandtofilesettings.json:manualy(withthelibrarypath).{
"lua.workspace.library":
[ "D:/LuaLibraries" ] }
- Add the
Examples
Example 1: "Hello World"
Description:
Print "Hello World" every 100ms to IO_Output.
For the script to work you need to have 2 functions "Initialite" and "Loop".
Copy the following code to an example.lua file.function Initialize() LoopPeriodMs = 100 end function Loop() IO.Write("Hello World ") endTo load the script on the inverter you need to go into
0x2040 0x05 - Script, where you select write from file and then click "...". A pop up window appears where you then located the saved script and click "Open", after that you click write.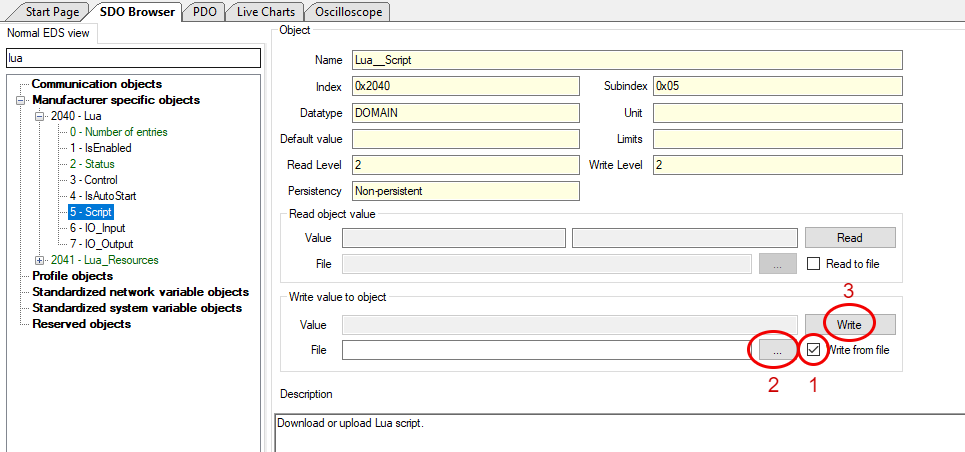
If the script is correctly written you can se under object
0x2040 0x02 - Statusthe value "3" - Which means that the downloaded file is valid. To run the script you need to set object0x2040 0x03 - Control = 2. You can see in status if the script is running the value should be "5".
To se the the "Hello World" you need to go to object0x2040 0x07 - IO_output, where you can click read and the string will appear in the Description window.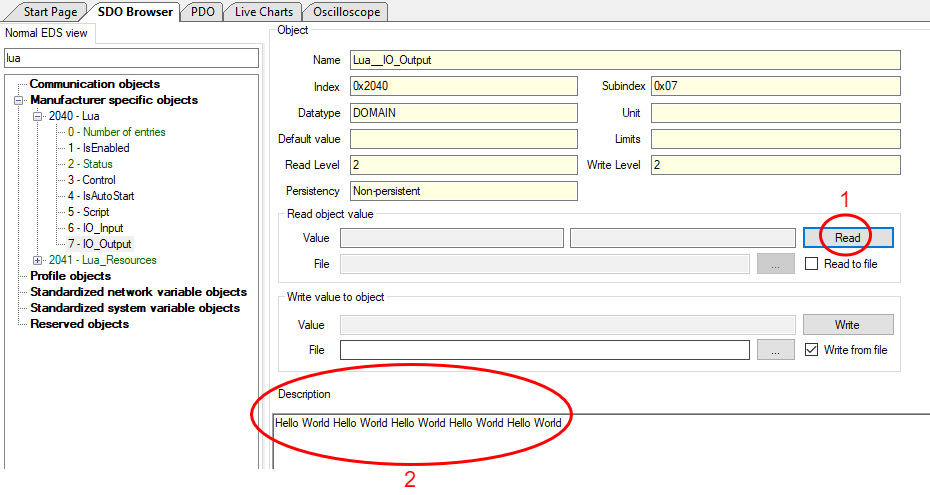
Example 2: Data types & variables
Example 2.1: Data types
Lua is a lightweight, high-level programming language known for its simplicity and flexibility. It has several basic data types, each serving a different purpose. Here are the main data types in Lua along with examples for each:
- Nil
Represents the absence of a value. - Boolean
Represents a boolean value, either true or false. - Number
Represents both integer and floating-point numbers. - String
Represents a sequence of characters. - Table
Represents associative arrays, which can be used as arrays, dictionaries, or other data structures. - Function
Represents a callable function.
function Initialize() LoopPeriodMs = 100 end function Loop() -- 1. Nil local myVariable = nil IO.Print(myVariable) -- Output: nil -- 2. Boolean local isTrue = true local isFalse = false IO.Print(isTrue) -- Output: true IO.Print(isFalse) -- Output: false -- 3. Number local integerNumber = 42 local floatingNumber = 3.14 IO.Print(integerNumber) -- Output: 42 IO.Print(floatingNumber) -- Output: 3.14 -- 4. String local myString = "Hello, Lua!" IO.Print(myString) -- Output: Hello, Lua! -- 5. Table local myTable = { key1 = "value1", key2 = "value2" } IO.Print(myTable.key1) -- Output: value1 IO.Print(myTable.key2) -- Output: value2 local arrayTable = { "apple", "banana", "cherry" } IO.Print(arrayTable[1]) -- Output: apple -- 6. Function local function myFunction(a, b) return a + b end IO.Print(myFunction(2, 3)) -- Output: 5 -- 6. Anonymous function local anonFunction = function(x, y) return x * y end IO.Print(anonFunction(4, 5)) -- Output: 20 endExample 2.2: Variables
- Global variables
Global variables are accessible from anywhere in the program unless shadowed by a local variable of the same name. By default, any variable declared without thelocalkeyword is global.
myGlobalVariable = 10 -- Global variable function printGlobal() print(myGlobalVariable) end printGlobal() -- Output: 10 - Local Variables
Local variables are only accessible within the block or function where they are declared. They help avoid polluting the global namespace and can be used to manage scope more effectively.
local myLocalVariable = 20 -- Local variable function printLocal() local myLocalVariable = 30 -- Local to this function print(myLocalVariable) end printLocal() -- Output: 30 print(myLocalVariable) -- Output: 20 - Table fields
Variables can also be fields of tables, allowing for the creation of more complex data structures like arrays, dictionaries, and objects.
local myTable = { field1 = "Hello", field2 = "World" } print(myTable.field1) -- Output: Hello print(myTable.field2) -- Output: World
Variable scope
- Global Scope: Variables declared outside of any function or block are global by default.
- Local Scope: Variables declared with the
localkeyword within a function, block, or loop are local to that block.
- Global vs. Local
myGlobal = "I am global" function testScope() local myLocal = "I am local" print(myGlobal) -- Accessible print(myLocal) -- Accessible end testScope() print(myGlobal) -- Accessible -- print(myLocal) -- Error: myLocal is not accessible here - Local Variable Shadowing
local x = 5 -- Local variable in the main chunk function shadowTest() local x = 10 -- Local variable in the function print(x) -- Output: 10 end shadowTest() print(x) -- Output: 5
Global variables and tables use a lot of memory, especially in embedded systems. To save memory, it's best to use local variables whenever possible.
If you use a global variable at the start of your code and don't need it later, clear the global variable to free up memory. You can do this by adding the following code:myGlobalVariable = nilExample 3: Inputs/Outputs
Example 3.1: Use of digital inputs & outputs
Turn low side 1 - ON when switch on digital pin 1 is switched ON.
function Initialize() LoopPeriodMs = 10 end function Loop() local switch = Digital.Get(DIGITAL_IN_1) if switch == 1.0 then Digital.Set(LOW_SIDE_1, 1) else Digital.Set(LOW_SIDE_1, 0) end endExample 3.2: Use of analog inputs
Print analog value of analog input 1 when switch on digital pin 1 is switched ON.
function Initialize() LoopPeriodMs = 10 end function Loop() local switch = Digital.Get(DIGITAL_IN_1) if switch == 1.0 then local rawVal = Analog.Get(ANALOG_IN_1) IO.Print(rawVal) end endExample 4: Blink LED
Example 4.1: Blink LED - "delay"
Loop period is set to 1000ms
LED is connected on low side 1.
Blink LED every 0.5s with Time.WaitMs().function Initialize() LoopPeriodMs = 1000 end function Loop() local ledState = Digital.Get(LOW_SIDE_1) if(ledState == 0.0) then Digital.Set(LOW_SIDE_1, 1.0) else Digital.Set(LOW_SIDE_1, 0.0) end Time.WaitMs(500) endNow set the LoopPeriodMs = 100
We see that the script does not run anymore, we get under status the number "6", which means "Script timed out and was stopped".
With the function Time.WaitMs(), we wait in the code for the specified time (in this example 0,5s). But we specified that the script must loop through under 100ms, and thus we get an error. Using tthe function Time.WaitMs() we have to be very careful.Example 4.2: Blink LED - using loop time
We want to blink the LED every 0.5s but still want to have the main loop to be executed every 10ms. We achive this with the following code: We count every loop from 1 to 50 and multiply the counter with the loop period. Then we divide the number with 500 and if the reminder is equal to 0 than we toggle the output.
Main_loop_period = 10 Counter = 1 function Initialize() LoopPeriodMs = Main_loop_period end function Loop() if ((Counter)*Main_loop_period)%500==0 then local ledState = Digital.Get(LOW_SIDE_1) if(ledState == 0.0) then Digital.Set(LOW_SIDE_1, 1.0) else Digital.Set(LOW_SIDE_1, 0.0) end end if Counter<50 then Counter=Counter+1 else Counter=1 end endExample 4.3: Blink LED - using processor time
The script initializes a start time variable and defines two functions. In the
Loopfunction, the script checks if theStartTimeis nil and if so, sets it to the current time in milliseconds.
TheLoopfunction then continuously gets the current time in milliseconds. If 500 milliseconds have passed since theStartTime, it resets theStartTimeto the current time.
It then gets the state of a digital outputLOW_SIDE_1.
IfLOW_SIDE_1is off (state is 0.0), it turns it on by setting its state to 1.0.
IfLOW_SIDE_1is on (state is not 0.0), it turns it off by setting its state to 0.0.This process repeats every 500 milliseconds, toggling the state of
LOW_SIDE_1each time.StartTime = nil function Initialize() LoopPeriodMs = 10 end function Loop() --Execute only once at the start of the loop if(StartTime == nil) then StartTime = Time.GetMs() end --Chechk every loop what is the time local CurrentTime = Time.GetMs() if (CurrentTime - StartTime >= 500) then StartTime = CurrentTime local ledState = Digital.Get(LOW_SIDE_1) if(ledState == 0.0) then Digital.Set(LOW_SIDE_1, 1.0) else Digital.Set(LOW_SIDE_1, 0.0) end end endExample 5: CAN send
Example 5.1: (CAN send simple message)
We want to send a simple CAN message frame from lua script every 100ms with ID = 0x205 and data value 500 using the first 2 bytes.

For this we can use the example 4.3 as a template. We need to add a CanID variable, the CAN.Initialite() function. For sending we only need the paramater CAN_TX_ONLY, messages will not be extended and the filters can also be 0, because as mentioned we will only send.
When that is finished we delete the code for toggling the output and create a custom function which will be called every 100ms.
The function takes in one argument which will be called Data_raw, that data is then split into 2 bytes and sent via the CAN.Send() function.CanID = 0x205 StartTime = nil function Initialize() CAN.Initialize(CAN_TX_ONLY,false,0,0) LoopPeriodMs = 10 end function Loop() --Execute only once at the start of the loop if(StartTime == nil) then StartTime = Time.GetMs() end --Chechk every loop what is the time local CurrentTime = Time.GetMs() if (CurrentTime - StartTime >= 100) then StartTime = CurrentTime SendData(500) end end function SendData(Data_raw) local val = Data_raw local byte0 = math.floor(val) & 0xFF local byte1 = (math.floor(val) & 0xFF00) >> 8 CAN.Send(CanID,{byte0,byte1,0,0,0,0,0,0}) endExample 5.2 : CAN send extended message (J1939)
We will do the same as in example 5.1 except we will send an extended message (It will be a J1939 message PH3 - the data order might be different).
ID = 0x18FF8203.
The only thing we need to change is 2 lines, we need to change the CanID and in the CAN.Initialize() function the boolean value to true. If we change only the CanID then the message will still be sent out but instead with ID 0x18FF8199 it will be 0x199 (the last 3 digits will be the ID).CanID = 0x18FF8199 CAN.Initialize(CAN_TX_ONLY,true,0,0)Example 6: CAN receive
Example 6.1 : CAN receive
In this example we will turn ON and OFF a LED that is connected on low side 1.
The Can ID has to be 0x123 and we will send only one byte of data. If the value of data is 1 then the LED will be turned ON, otherwise it will be turned OFF.
To use the CAN receive function we need to change the CAN.Initialite() and add a function called "CAN.Received(message) end". With the following code we always go into the CAN.Received() function when a message is received and then we check if the ID is correct.function Initialize() CAN.Initialize(CAN_RX_TX,false,0,0) LoopPeriodMs = 10 end function Loop() end function CAN.Received(message) if (message.ID == 0x123) then IO.Print(" Data1: ", message.Data[1]) if(message.Data[1] == 1) then Digital.Set(LOW_SIDE_1, 1.0) else Digital.Set(LOW_SIDE_1, 0.0) end end endWe can also add a filter so we only go into the CAN.Received() when the message has a proper ID. We achieve this with the following code.
function Initialize() CAN.Initialize(CAN_RX_TX,false,0x123,0x123) LoopPeriodMs = 10 end function Loop() end function CAN.Received(message) --if (message.ID == 0x123) then IO.Print(" Data1: ", message.Data[1]) if(message.Data[1] == 1) then Digital.Set(LOW_SIDE_1, 1.0) else Digital.Set(LOW_SIDE_1, 0.0) end --end endExample 7: Read & Set CANopen objects
Within a lua script you can read and modify CANopen objects, just like with the configurator tool. In this example we will use an analog input (HW AIN1 )as throttle and set the
0x3010 0x05 - VelocityRefobject. We will also read the same object and print it to the lua output. We will also limit the max RPM inside lua with math library, if a problem with the analog reading appears the motor wont run away.0V = 0RPM
5V = 200RPM
For this example to work you need an inverter that is configured to work with the connected motor. You need to be first able to spin it in velocity mode using the configurator.
When you start the script go to operational and turn on PWMs manually.If the analog throttle is damaged (short or broken circuit), there is no safety implemented. If there is a break no voltage will be applied RPM = 0. But if there is a short than the inverter will get full 5V on the analog input RPM = MAX. This is why we need to implement some safety features (will be shown in example 8).
VelocityRef = {0x3010, 0x05} function Initialize() LoopPeriodMs = 10 end function Loop() local rpm = Analog.Get(ANALOG_IN_1) * 40 rpm = math.min(rpm,200) CANopen.SetObjectValue(VelocityRef, rpm) local VelRef_from_CANopen = CANopen.GetObjectValue(VelocityRef) IO.Print(VelRef_from_CANopen) endExample 8: Demo application
Example 8.1 : Demo application using CANopen objects.
We will use HW AIN1 for throttle input - potenciometer 0-5V.
Min RPM = 0 = 0.5V
Max RPM = 200 = 4.5V
If throttle voltage is bellow 0.2V and above 4.8V we stop the motor (short and break protection).
If voltage is bellow 0.5 we enable the PWMsfunction Initialize() CANopen.SetObjectValue(VelocityRef, 0) -- Set Velocity ref to 0 CANopen.SetObjectValue(ControlMode, 1) -- Set velocity mode CANopen.SetNMTState(CO_OPERATIONAL) -- Go into operational mode LoopPeriodMs = 100 end function Loop() local throttleVoltage = Analog.Get(ANALOG_IN_1) -- Decide whether to enable or disable the motor if Digital.Get(DIGITAL_IN_1) == 1 then -- only enable if voltage on analog in 1 is < 0.5 V so the motor does not start ang goes to high RPM if (throttleVoltage < 0.5) then CANopen.SetObjectValue(PwmControl, 1) end else CANopen.SetObjectValue(PwmControl, 0) end if (throttleVoltage > 0.2 and throttleVoltage < 4.8) == true then -- Map values 0.5 - 4.5 V to 0 - 200 RPM and local rpm = (throttleVoltage - 0.5) / 4 * 200 rpm = math.min(rpm, 200) rpm = math.max(rpm, 0) CANopen.SetObjectValue(VelocityRef, rpm) else CANopen.SetObjectValue(VelocityRef, 0) CANopen.SetObjectValue(PwmControl, 0) end endExample 8.2 : Demo application using dedicated motor library.
Min RPM = 0 = 0.5V
Max RPM = 200 = 4.5V
If throttle voltage is bellow 0.2V and above 4.8V we stop the motor (short and break protection).
If voltage is bellow 0.5 we enable the PWMs.
With the use of the motor library the code is easier to read and write than example 8.1.function Initialize() Motor.SetReferenceVelocity(0) -- Set Velocity ref to 0 Motor.SetControlMode(VELOCITY_MODE) -- Set velocity mode CANopen.SetNMTState(CO_OPERATIONAL) -- Go into operational mode LoopPeriodMs = 100 end function Loop() local throttleVoltage = Analog.Get(ANALOG_IN_1) -- Decide whether to enable or disable the motor if Digital.Get(DIGITAL_IN_1) == 1 then -- only enable if voltage on analog in 1 is < 0.5 V so the motor does not start ang goes to high RPM if (throttleVoltage < 0.5) then Motor.Enable() end else Motor.Disable() end if (throttleVoltage > 0.2 and throttleVoltage < 4.8) == true then -- Map values 0.5 - 4.5 V to 0 - 200 RPM and local rpm = (throttleVoltage - 0.5) / 4 * 200 rpm = math.min(rpm, 200) rpm = math.max(rpm, 0) Motor.SetReferenceVelocity(rpm) else Motor.SetReferenceVelocity(0) Motor.Disable() end endExample 9: Throttle script (state - machine)
We will control the throttle using a potentiometer on Analog_IN_1, which will have short and break circuit protection implemented. We will also have a deadband of 0.3V. The minimum speed shall be 0 RPM and the max 300 RPM (limits).
The motor will only spin if the digital pin 1 is connected - we will have a switch ON/OFF.
The motor direction can be changed with a switch on digital pin 3.The actual rpm is set through the objects
0x3020 0x0D - Forward_max_speedand0x3020 0x0E - Reverse_max_speed.If the motor spins at Forward max speed and you switch the direction with the switch then it will spin at Reverse max speed
There will be LED light connected to HS1 which will be for diagnostic. When the system is working it will be turned on. If the system is in error mode it will blink.
ERRO2 = blink 2 times then pause
ERRO3 = blink 3 times then pauseWorking voltage range
Min_RPM = 0, at Min_Volt = 0.5V
Max_RPM = 200, as Max_Volt = 4.5VDeadBand = 0.3V
This means that if voltage goes (bellow Min_RPM - DeadBand)
ERROR1 => Out of bounds
ERROR2 => Analog_In_1 < Min_Volt- DeadBand
ERROR3 => Max_Volt + DeadBand < Analog_In_2The application will send a standard CANopen error message on 0x80 + nodeID every 100ms while in error state. There will also be TPDO message on 0x180 + nodeID which will send out the warrning code every 100ms while in start state.
0x80 + nodeID message will have a data length of 8 bytes. And the mapping is as follows:
byte0:
bit0 = Throttle potentiometer error
bit1 = Throttle potentiometer break circuit error
bit2 = Throttle potentiometer short circuit error0x180 9 nodeID message will have a length of 8 bytes. And the mapping is as follows:
byte0: warning codeWarning code:
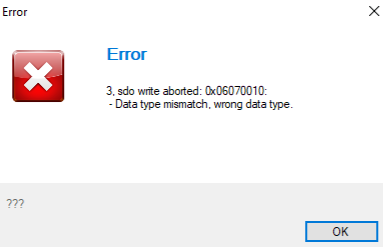
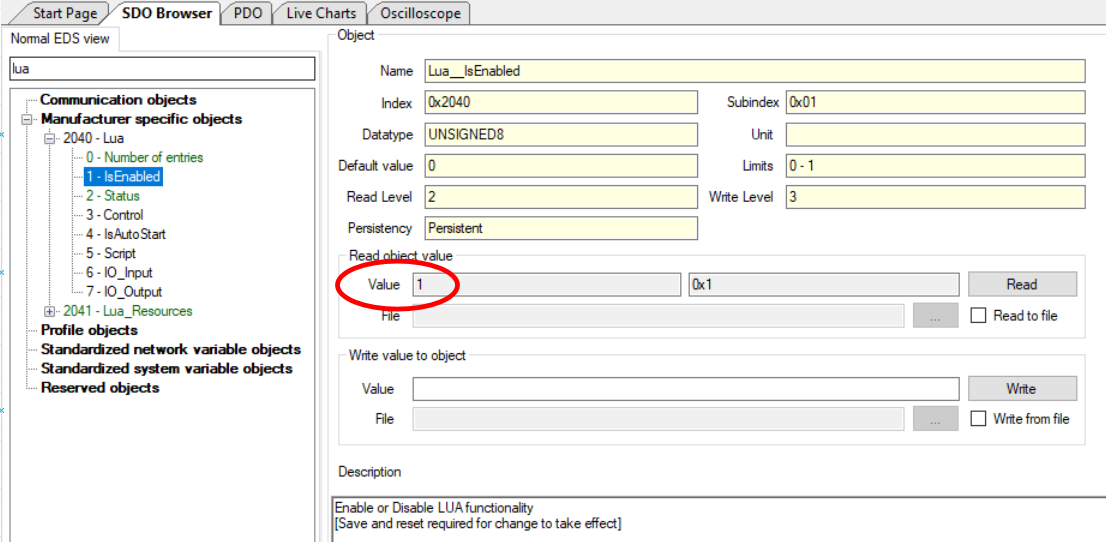
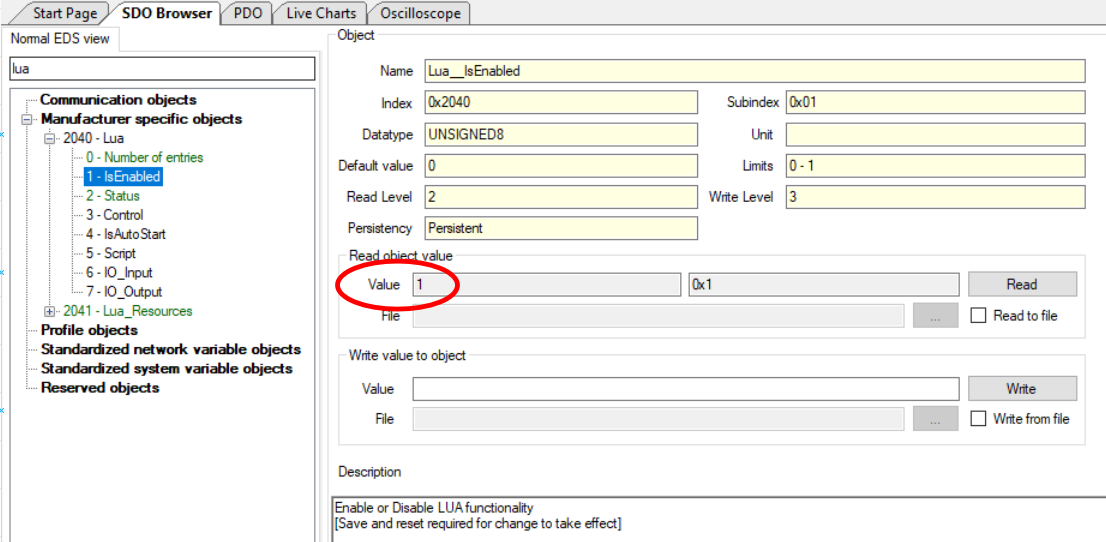
0x01 Motor is disabled, due to potentiometer not in min position--[[ @file Example_9 @brief User manual examples @author Matic Jehart @date 05.07.2024 @version V1.0.0 ]] MAX_RPM = 300 MIN_RPM = -300 -- Objects FORWARD_MAX_SPEED_ID = {0x3020, 0xD} REVERSE_MAX_SPEED_ID = {0x3020, 0xE} LED_ID = {0x30A4, 0x02} -- Inputs ENABLE_SW = DIGITAL_IN_1 DIRECTION_SW = DIGITAL_IN_2 THROTTLE_IN = ANALOG_IN_1 DIRECTION_IN = DIGITAL_IN_3 -- Voltage thresholds THROTTLE_MIN_V = 0.5 THROTTLE_MAX_V = 4.5 DEADBAND = 0.3 ERROR = 0 ERROR_reg = 0 WARNINGS = 0 StartTime1 = nil StartTIme2 = nil StartTime3 = nil StartTime4 = nil FlagCounter = 0 DIN = {ON = 1, OFF = 0} LED = {OFF = 0x0, ON = 0x1} DIRECTION = {FORWARD = 1, REVERSE = 0} -- Application FSM Application = {} function Initialize() CAN.Initialize(CAN_TX_ONLY,false,0,0) Application.NextState = "Idle" Motor.SetReferenceVelocity(0) Motor.SetControlMode(VELOCITY_MODE) LoopPeriodMs = 10 end function Loop() Application[Application.NextState]() end Application.Idle = function () local ledValue = CANopen.GetObjectValue(LED_ID) if ledValue == 1 then CANopen.SetObjectValue(LED_ID, 0) end CANopen.SetNMTState(CO_OPERATIONAL) Application.NextState = "Start" end Application.Start = function () -- IF enable switch is off go to stop state if (Digital.Get(ENABLE_SW) == DIN.OFF ) then Application.NextState = "Stop" return end -- Get voltage local throttleVoltage = Analog.Get(THROTTLE_IN) -- Go into error state if throttle voltage is out of bounds if OutOfBounds(throttleVoltage, (THROTTLE_MIN_V - DEADBAND), (THROTTLE_MAX_V + DEADBAND)) == true then ERROR = (ERROR or 0) | 1 Application.NextState = "Error" return end -- Check that voltage is bellow minimal throttle voltage - so that the motor does not start at high speed if Motor.GetState() == MOTOR_OFF then if throttleVoltage < (THROTTLE_MIN_V) then Motor.Enable() WARNINGS = WARNINGS & Negate_Xbit(1, 8) return else WARNINGS = (WARNINGS or 0) | 1 end end -- Only set velocity reference when pwms are enabled if ((Motor.GetState() == MOTOR_RUN) and (throttleVoltage >= 0.5)) then -- Calculate Voltage --local rpm = ((throttleVoltage - THROTTLE_MIN_V) * MAX_RPM) / (THROTTLE_MAX_V - THROTTLE_MIN_V) local rpm = ((throttleVoltage - THROTTLE_MIN_V) * GetMaxSpeed()) / (THROTTLE_MAX_V - THROTTLE_MIN_V) -- Limit RPM rpm = math.min(rpm, MAX_RPM) rpm = math.max(rpm, MIN_RPM) IO.Print("REF: ", rpm) -- Set ref Motor.SetReferenceVelocity(rpm) end -- Send warnings every 100ms local CurrentTime = Time.GetMs() if((StartTIme2 == nil) or (CurrentTime-StartTIme2) >= 100) then SendWarnings() end end Application.Stop = function () Motor.Disable() --When eneble sw is activated go to start state if (Digital.Get(ENABLE_SW) == DIN.ON) then Application.NextState = "Start" end end Application.Error = function () Motor.Disable() Motor.SetReferenceVelocity(0) local ledValue = CANopen.GetObjectValue(LED_ID) local throttleVoltage = Analog.Get(THROTTLE_IN) local ErrorBlinkCounter = 0 local CurrentTime --If bit 0 = 1 than OutOf Bounds is detected if (ERROR & 1) == 1 then if throttleVoltage < (THROTTLE_MIN_V - DEADBAND) then ERROR = ERROR | 2 ERROR_reg = ERROR_reg | 1 -- set the generic error register elseif throttleVoltage > (THROTTLE_MAX_V + DEADBAND) then ERROR = ERROR | 4 ERROR_reg = ERROR_reg | 1 -- set the generic error register else -- Clear ERROR bit 0, 1, 2 ERROR = ERROR & Negate_Xbit(7, 16) -- Clear the generic error register ERROR_reg = ERROR_reg | Negate_Xbit(1, 8) end end -- Send Errors every 100ms CurrentTime = Time.GetMs() if ((StartTime1 == nil) or (CurrentTime - StartTime1) >= 100) then StartTime1 = CurrentTime SendError() end -- Determine the how many times we want to blink the led if ((ERROR & 2) >> 1) == 1 then ErrorBlinkCounter = 2 elseif ((ERROR & 4) >> 2) == 1 then ErrorBlinkCounter = 3 end -- Start the blinking cycle if enough time has passed CurrentTime = Time.GetMs() if StartTime3 == nil or (CurrentTime - StartTime3) >= 3000 then StartTime3 = CurrentTime FlagCounter = 0 end -- Handle the blinking logic if FlagCounter < 2 * ErrorBlinkCounter then if StartTime4 == nil or (CurrentTime - StartTime4) >= 200 then StartTime4 = CurrentTime FlagCounter = FlagCounter + 1 -- Toggle LED if ledValue == 0 then CANopen.SetObjectValue(LED_ID, LED.ON) else CANopen.SetObjectValue(LED_ID, LED.OFF) end end end if ERROR == 0 then FlagCounter = 0 CANopen.SetObjectValue(LED_ID, LED.OFF) Application.NextState = "Idle" return end end function GetMaxSpeed() if Digital.Get(DIRECTION_IN) == DIRECTION.FORWARD then return CANopen.GetObjectValue(FORWARD_MAX_SPEED_ID) end return CANopen.GetObjectValue(REVERSE_MAX_SPEED_ID) end function SendError() -- Send on ID + nodeID; we get the NodeId from CANopen off the inverter local CanID = 0x80 + CANopen.GetObjectValue({0x100B, 0x00}) local byte0 = ERROR & 0xFF local byte1 = (ERROR & 0xFF00) >> 8 local byte2 = ERROR_reg & 0xFF CAN.Send(CanID,{byte0, byte1, byte2, 0, 0, 0, 0, 0}) end function SendWarnings() -- Send on PDO + nodeID; local CanID = 0x180 + CANopen.GetObjectValue({0x100B, 0x00}) local byte0 = WARNINGS & 0xFF CAN.Send(CanID,{byte0, 0, 0, 0, 0, 0, 0, 0}) end function OutOfBounds(throttleVoltage, minVal, maxVal) if (throttleVoltage < minVal) or (throttleVoltage > maxVal) then return true else return false end end --- Fuctino to negate bits ---@param value number Value to negate ---@param xBit number Number of bites e.g 16bit => xBit = 16 function Negate_Xbit(value, xBit) local negated = 0 for i = 0, (xBit - 1) do if (value & (1 << i)) == 0 then negated = negated + (1 << i) end end return negated endError 0x06070010 when loading a script may indicate Lua object 0x2040 0x01 isn't set to 1. To resolve, ensure proper access level in Configurator to unlock this feature. If you do not have the proper access level contact us.
Best practices
For further insights and practical tips, I recommend exploring "Programming in Lua," available at: Programming in Lua. Authored by experts in the field, this comprehensive resource offers invaluable guidance for Lua developers. It's worth noting that the entire topic is accessible free of charge as of April 24, 2024. Additionally, some sections of the topic include examples to further illustrate key concepts and techniques.
Minimizing Global Variables
In Lua scripting, it's imperative to exercise caution with global variables to prevent memory exhaustion and script failures, especially on embbeded systems. Emphasizing the utilization of local variables whenever possible is paramount. By minimizing global variable usage, we mitigate the risk of memory overflow and enhance script performance.
Example:
myGlobalVaribale = 10 --Global variable
local myLocalVaribale = 10 --Local variableIssues
If IO.Print() isn't functioning, it may signal an outdated firmware version. Firmware 0x10C01 lacks support, while 0x10D02 enables the function.
- In the opened